Как сделать велосипед из гироскутера
Гироскутер – вещь, несомненно, полезная, но в некоторых случаях сложно поспорить, что вместо него лучше было бы иметь какое-то другое средство передвижения. Выбрасывать старенький двухколесный агрегат жалко, а перепродать за такую цену, чтобы можно было купить другой вид транспорта, вряд ли получится. Народные умельцы во многих случаях занимаются не торговлей, а переделкой механизма своими руками – благодаря этому можно сделать так, чтобы транспорт изменился до неузнаваемости. Рассмотрим, что можно сделать из гироскутера.
Электросамокат
Один из популярных вариантов переделки гироскутера – изготовление на его базе самоката с самостоятельным ходом. Такой агрегат не требует от пассажиров столь же высокой способности удерживать равновесие, в этом плане он даже проще, чем велосипед, потому востребован.
Следует уточнить, что в большинстве случаев для изготовления электросамоката нужен самокат обычный – именно он будет основой для будущего агрегата.
От самого гироскутера используется только мотор-колесо – в идеале оно должно быть того же диаметра, что и самокатное. Специалисты советуют сначала выполнить заднюю вилку для мотор-колеса из древесины или плотного картона – так вы сможете сразу увидеть свои ошибки. А полноценную деталь, изготавливаемую из надежной квадратной трубы, будете делать уже по заранее проверенному образцу.
После того как металлическая вилка будет разрезана, сварена и отшлифована, на нее болтами и гайками устанавливается кронштейн. При этом надо предусмотреть подачу напряжения на бесщеточный двигатель – без контроллера ваш самокат так и останется обыкновенным, а не электрическим. По мощности контроллер должен соответствовать двигателю. Чаще всего его монтируют на задней вилке, а значит, нужно проложить проводку вдоль рамы к ручке газа, при этом провода обычно фиксируются пластиковыми креплениями. В удобном месте в систему следует вмонтировать разъем для зарядного устройства.
Литиевые батареи будут хранить заряд электросамоката, их можно устанавливать как параллельно, так и последовательно. Чрезмерный заряд грозит в лучшем случае быстрым износом батарей, потому нужно дополнительно установить контроллер BMS – он не допустит превышения емкости.
Собранную конструкцию следует аккуратно испытать в условиях помещения, оберегая от попадания грязи и пыли. Если получившийся самокат работает исправно, и претензий к нему нет, нужно позаботиться о защите основных узлов от грязи и влаги. Крышку лучше всего изготавливать из 2-миллиметрового листа алюминия по шаблону, предварительно выполненному на картоне. Чтобы не портить дизайн агрегата, крышку перед монтажом на саморезы выкрашивают в цвет, который логично вписывается в цветовую гамму транспортного средства.
Детская машина
Обыкновенный гироскутер для маленького ребенка может оказаться слишком сложным испытанием на способность держать равновесие, да и не сможет он увези сразу двух пассажиров. Кто-то из изобретательных родителей однажды понял, что на базе гироскутера можно соорудить небольшой электромобиль – мало того, что конструкция окажется значительно более устойчивой, так еще и мест в ней два вместо одного!
Ключевой особенностью такого решения является то, что карт – это всего лишь «прицеп» для гироскутера, а значит, его в любой момент можно отцепить, снова получив на выходе обыкновенный гироскутер в первозданном виде.
Начало сборки «автомобиля» заключается в разварке задней оси, на которую нужно будет прикрепить два колеса того же диаметра, что и у самого гироскутера.
При этом ширина задней оси может быть намеренно увеличенной по сравнению с шириной гироскутера – так повышается устойчивость машинки и минимизируется риск аварии. Далее из профильной трубы сваривается каркас будущего электромобиля с заделом под переднее и заднее сиденья. Заднее сиденье обычно возвышается прямо над задними колесами, в его опоры встраиваются амортизаторы, призванные смягчать тряску для обоих пассажиров. Переднее сиденье водительское, оно теоретически должно быть более удобным, потому для его изготовления обычно используют уже готовый вариант сиденья со спинкой от чего-либо.
Сваренный каркас примеряется к гироскутеру, и если с ним все в порядке, мастер переходит к следующему этапу – окончательной подгонке, шлифовке швов, зашкуриванию любых травмоопасных зазубрин. После этого необходимо наварить пол из толстого слоя листового металла, способного выдержать вес двоих детей. Предпочтение во всех случаях отдается алюминию, ведь при своем малом весе он довольно прочен и способен выдержать массу пассажиров, не создавая чрезмерной нагрузки на двигатель гироскутера. После того как дно будет наварено, можно приступать к покраске для придания изделию декоративного вида.
Некоторые мастера также считают нужным позаботиться о корпусе в виде стен и дверец, хотя бы невысоких. При наличии материала, времени и хороших навыков сварщика их можно сделать, но следует помнить, что возможности двигателя гироскутера далеко не безграничны. Планируя сконструировать целый «кабриолет», вы должны быть уверены либо в достаточной мощности двигателя, либо в том, что выбираете, действительно, легкие материалы.
Детский велосипед без контроллера
В некоторых случаях оригинальный гироскутер настолько старый и изношенный, что заниматься обновлением его электронных узлов просто нет смысла. В таком варианте он подлежал бы разве что отправке на свалку, но опытный человек с руками способен использовать его более логично – в качестве детали для изготовления детского велосипеда. Подобная конструкция, ввиду отсутствия контроллера и батарей, будет представлять собой транспорт, приводимый в движение только усилиями ног маленького пассажира, но тот все равно наверняка обрадуется.
Гироскутер может не подвергаться никаким конструктивным изменениям, хотя не возбраняется вынуть из корпуса все лишнее – раз батареи и контроллеры не будут использоваться по назначению, пусть не добавляют транспортному средству лишнего веса. В остальном это уже готовая задняя ось с присоединенными к ней колесами.
Задачей умельца является поиск старого или приобретение нового переднего колеса с педалями, которое заменит новому транспортному средству отсутствующий мотор. Имея перед глазами заднюю ось с колесами и переднее колесо с педалями, можно составить примерный чертеж рамы, так чтобы она подходила маленькому пассажиру по росту. Для изготовления каркаса лучше всего использовать алюминиевые профильные трубы, поскольку они одновременно очень прочные и легкие – значит, ребенку не придется прикладывать огромных усилий, чтобы поехать.
Если вы никогда не имели предварительного опыта конструирования столь сложных механизмов, можно попробовать сначала выполнить все детали из более податливых материалов вроде древесины. Примерив все, что получилось, вы увидите свои помарки, если таковые есть, или же получите готовые шаблоны, позволяющие более точно нарезать алюминий.
Вырезав необходимое количество деталей, сварите их, еще раз примерьте к гироскутеру и переднему колесу, с которыми их нужно будет скрепить шурупами или сварными швами. Все поверхности должны быть аккуратно зашлифованными. Если у вас возникли сложности с изготовлением отдельных узлов велосипеда, их можно докупить в магазине (особенно это касается сиденья), но этот момент желательно предусмотреть заранее, иначе не факт, что вы сможете подогнать свою сварку под заводские комплектующие.
Испытайте конструкцию сначала без ребенка – проверьте, нормально ли прокручиваются педали, не является ли ход слишком тугим, удобно ли поворачивать руль.
Различные дополнительные приспособления вроде фар, корзинок или тормозов 3-колесному детскому велосипеду не нужны, но для большинства малышей принципиально, чтобы их транспортное средство выглядело красиво, потому окрасьте каркас велосипеда яркими красками.
В следующем видео вы сможете наблюдать пример создания машины из гироскутера.
Электровелосипед с двигателем от гироскутера

Если у вас есть старый гироскутер, из него можно сделать отличный электровелосипед. В гироскутере установлено два бесщеточных двигателя, они редко ломаются и имеют довольно продолжительный срок службы. На одном таком двигателе автор сделал себе электровелосипед, получилось все довольно интересно. Хоть конструкция велосипеда немного и изменилась, он все равно остался быть велосипедом, то есть на нем можно ехать классическим способом, если аккумуляторы разрядятся.
Интересен тот факт, что при работе двигателя педали не вращаются, махать ногами не понадобится, ведущая звездочка велосипеда теперь тоже работает на храповом механизме. Процесс изготовления самоделки не сложный, из запчастей тут в основном используются детали от велосипедов. Если проект вас заинтересовал, предлагаю изучить его более детально.
Материалы и инструменты, которые понадобились автору:
Список материалов:
— двигатель от гироскутера ;
— велосипед;
— 2 звездочки от заднего колеса (с храповиком);
— цепь;
— аккумулятор;
— контроллер для бесщеточного двигателя ;
— стальной уголок;
— стальные хомуты;
— болты с гайками;
— втулки от задних колес велосипеда;
— провода;
— ручка управления двигателем;
— ведущая звездочка от велосипеда.
Список инструментов:
— болгарка;
— сварочный аппарат;
— дрель;
— отвертка и гаечные ключи;
— изолента.
Процесс изготовления велосипеда:
Шаг первый. Дорабатываем ведущую звездочку велосипеда
Для начала доработаем ведущую звездочку велосипеда, сделать нужно так, чтобы тут появился храповой механизм. Благодаря такой доработке педали не будут крутиться, когда будет работать двигатель. В то же время, мы всегда сможем доехать на педалях, если что-то поломается или сядет аккумулятор.


















Для такой доработки нам понадобится втулка от заднего колеса, а также звездочка с храповиком. Разбираем кассету, высверливая заклепки. В итоге у нас останется шатун с маленькой ведущей звездочкой, привариваем сюда втулку от заднего колеса велосипеда, а потом срезаем ведущую звездочку. Далее на приваренную втулку можно установить ведомую звездочку от колеса с храповиком. К этой звездочке привариваем среднюю ведущую звездочку велосипеда, а потом к средней болтами с гайками прикручиваем и самую большую. В итоге у нас получится две звездочки на храповом механизме.
Шаг второй. Подготавливаем двигатель
Подготовим двигатель, для этого нам нужно разобрать гироскутер, достать двигатель, а также нужно будет разобрать и сам двигатель. Шину можно снять, она нам не понадобится. Стачиваем с корпуса колеса бортики, сюда мы будем крепить ведущую звездочку, она также будет работать на храповом механизме. Для начала нам понадобится еще одна втулка от заднего колеса велосипеда, ее привариваем к ведущей звездочке велосипеда и обрезаем лишнее. В итоге у нас теперь втулка установлена на кронштейне, который мы можем прикрутить к мотор-колесу. Сверлим отверстия и хорошо все прикручиваем болтами с гайками, не забывайте про гровера. Колесо можно собирать, после сборки убедитесь в том, что головки болтов не мешают вращаться колесу.


























Ну а далее автор нашел два стальных хомута и закрепил их на раме велосипеда. К этим хомутам был приварен уголок, ну а к уголку можно приварить и наш маленький уголок, с закрепленным на нем мотор-колесом. Вот и все, теперь двигатель вполне надежно закреплен на раме.
Шаг четвертый. Установка цепи
Устанавливаем велосипедную цепь, обрезаем лишнее, чтобы получить нужное натяжение. В завершении пробуем включить двигатель, а также крутим педали. Если цепь не спадает, все отлично.








Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Электровелосипед двухскоростной из мотор-колеса от гироскутера.
Привет, пикобач! Надеюсь, руки твои злотые и мозг не заплыл маслом из чипсов и картофеля фри — сможешь понять то, что не поймет 90% прочитавших. как сделать электровелосипед из мотор-колеса от гироскутера. Ведь в любом гироскутере, даже полностью сломанном, мотор-колесо (хотя бы одно) точно будет исправным.
В чём техническая проблема этого мотор-колеса? Проблема всего одна — оно слишком слабое для велосипед и не имеет встроенного редуктора. Похожего размера мотор-колеса (без редуктора) в велосипеде не используются и не могут быть использованы. если взять колесо от гироскутера, просверлить в нём дырочки для спиц и использовать как колесо, то оно никуда не поедет и перегреется. Кончено, выход и из этого положения есть, если использовать сразу два мотор-колеса для одного велосипеда, тогда теоретически должно получиться!
Или, диаметр колеса должен быть совсем маленький, гораздо меньше обычного велосипедного колеса — например, на Стриде мотор-колесо от гироскутера вполне работает:
Но, если техническое задание состоит в том, что бы поставить мотор-колесо на обычной велосипед, то придется после мотор-колеса делать редуктор! Как не странно, если делать редуктор, то проще сделать его двухступенчатым, и установить как можно ниже, что бы сместить центр тяжести как можно ближе к опорному основанию, то есть повысить общую устойчивость велосипеда — попытаться сделать самодельный «педалик» (моторизированный привод к педалям):
Однако, три цепи и промежуточный вал — это не только сложно, но и очень шумно! Ведь все эти цепи и валы не слабо шумят. Так что, логичнее всего попытаться максимально упростить конструкцию, снизив количество звездочек и цепей.
Но, как тогда добиться тяги и чем переключать скорости? Ведь просто если сделать одну ступень редуктора, будет совсем медленно ехать. либо, будет ехать быстро и перегреваться).
Что такого у нас остаётся свободным, что можно использовать для переключения скоростей (изменения коэффициента редукции)? Учитывая, что этот электрический двигатель можно закрутить в любую сторону идеальным кажется решение, где сменой направления вращения можно было бы менять коэффициент редукции!
Поняв это я полез технические источники в поиске подобной реализации и, как не странно, довольно быстро нашёл его! Только, там он был реализован на обычном велосипеде — без мотора, а нам нужно применить его к мотор-колесу от гироскутера!
Меня это вдохновило и я, сидя на диване, продумал следующее — просьба сильно не пинать, реализацию сейчас делаю, а пока что видео о том, что я думаю должно получиться в конце. Но и, собственно, объяснение самой идеи переключения скоростей реверсирование двигателя:
Как переделать электросамокат из гироскутера своими руками
Многие люди интересуются, можно ли сделать электросамокат из гироскутера. Сегодня любой желающий может превратить вышедший из строя гироскутер в электросамокат с большим КПД.

Общие принципы переделки самоката из гироскутера
Нужно запомнить главные правила переделки одного устройства в другое. До начала процесса изготовления надо выбрать базовый аппарат для переделки. Опытные мастера рекомендуют применять гироскутер. Есть и иные варианты, но данный является оптимальным.
Начинающим советуют попробовать сделать самокат из обыкновенного шуруповерта. Он считается базовым устройством. Для передачи крутящего момента требуется цепь. Ее установка и обслуживание не вызывают каких-либо сложностей. Существуют и альтернативы. Самыми распространенными являются жесткие передачи, шестеренки и фрикционная насадка.
При креплении колес важно учитывать, что одно из них должно быть ведущим. Если предпочесть переднее, аппаратом будет легче управлять. При ведущем заднем колесе монтаж будет более простым.
Для самодельных самокатов необходимо сделать прочную раму. Лучше всего ее изготовить из стальных труб. Их толщина составляет около 2,5 мм. Этого будет достаточно для максимальной нагрузки в 100 кг. Если хочется ее увеличить, следует брать трубы со стенками большей толщины.

В качестве источника питания можно использовать литиевую батарею. Подойдет и первоначальный аккумулятор, когда самокат мастерят из шуруповерта. Хорошей заменой станут батареи от современных игрушек.
Необходимые инструменты и материалы
Чтобы переделка гироскутера в электросамокат была правильной, стоит позаботиться о наличии всех необходимых инструментов и материалов:
- простой самокат;
- старый гироскутер;
- предполагаемый источник питания;
- контроллер бесщеточных двигателей;
- квадратные трубы из стали;
- контроллер аккумуляторов и др.
Понадобится подготовить следующие приспособления:
- болгарку;
- аппарат для сварки;
- дрель;
- всевозможные отвертки;
- плоскогубцы;
- клеевой пистолет;
- прибор для измерений и пр.

Пошаговая инструкция — как переделать электросамокат из гироскутера?
Убедившись в наличии всего необходимого, можно приступать к самому процессу изготовления электросамоката. Для этого желательно придерживаться приведенного ниже алгоритма.
Сперва надо разобрать гироскутер, от которого понадобится мотор-колесо. Его мощность может быть около 350 Вт, а диаметр должен составлять 20 см. У автора изобретения колеса самоката являлись одинаковыми.
Потом необходимо сделать заднюю вилку. Прежде всего нужно закрепить колесо на самокате посредством кронштейна для тренировки, можно изготовить шаблон из дерева или плотного картона. Макет станет наглядным пособием, и смастерить подходящий крепеж будет проще.
Лучшим материалом для его изготовления является квадратная труба. Ее надо разрезать, сварить, отшлифовать и просверлить в ней отверстия. После этого легко установить кронштейн, используя болты и гайки.
Для работы бесщеточного двигателя необходимо подумать о подаче напряжения. С такой задачей отлично справляется контроллер. Он должен подходить под мотор с мощностью 350 Вт.

Газовая ручка электронная закрепляется так же, как и ЖК-экран. Затем надо проложить провода по раме и зафиксировать их пластиковыми стяжками. На раме необходимо выбрать место для гнезда зарядного устройства. После этого просверлить отверстия и установить разъем, крепящийся гайкой.
Изначально контроллер оборотов располагается в защитном корпусе. Однако его можно закрепить и на задней вилке. Потом надо подключить все нужные провода и прикрепить контроллер саморезами. Вместо них можно взять болты.
Теперь надо заняться установкой литиевых батарей. Для создания требуемого напряжения их соединяют последовательно или параллельно. Также стоит поставить защиту от перезаряда. Ей станет контроллер BMS. Без данного элемента нельзя заряжать аккумулятор. Это грозит его порчей, а иногда взрывом или воспламенением.
Для источников питания является вредным и нулевой уровень заряда. Они начинают выходить из строя. Здесь понадобится подходящий контроллер. Соединить ячейки проще всего точечной сваркой. В конце батарейный блок надо прикрепить на раме.
Необходимо проверить исправность системы, аккумулятор и контроллер оборотов подключить к двигателю. Ручкой газа следует активировать колесо, которое должно вращаться в заданном направлении. Работающий мотор реагирует на угол поворота ручки и регулирует количество оборотов. Если все правильно функционирует, самокат почти готов.

Источник питания необходимо защитить от механических повреждений и попадания влаги. Для этого нужно над ними установить крышку. Сначала из картона вырезать шаблон. После его изготовления можно сделать крышку. Подойдет лист алюминия с толщиной 2 мм. Защита крепится саморезами. Для улучшения внешнего вида самоката крышку желательно покрасить в черный матовый цвет.
Для завершенного вида необходимо поставить на задний кронштейн заглушки. Тогда внутрь конструкции не попадет грязь. Крепление осуществляют горячим клеем.
В конце следует испытать готовый электросамокат в движении. При массе тела водителя 90 кг устройство способно разгоняться до 22 км/час. Это является хорошим результатом. Пробег с полным зарядом составляет 15-18 км.
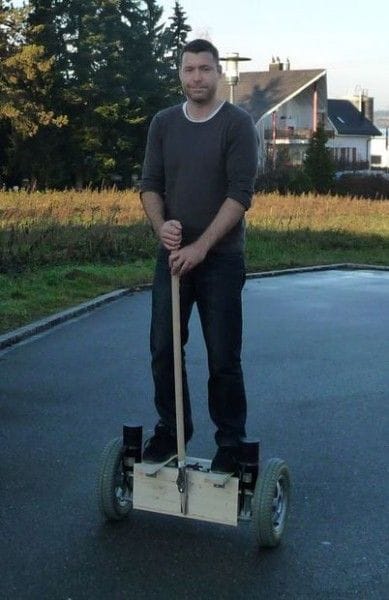
Как сделать гироскутер своими руками в домашних условиях?


Этот самодельный гироскутер построен на базе рамы — шасси из рифленого алюминиевого листа размером 500 х 360 х 7 мм, на который устанавливаются двигатели.

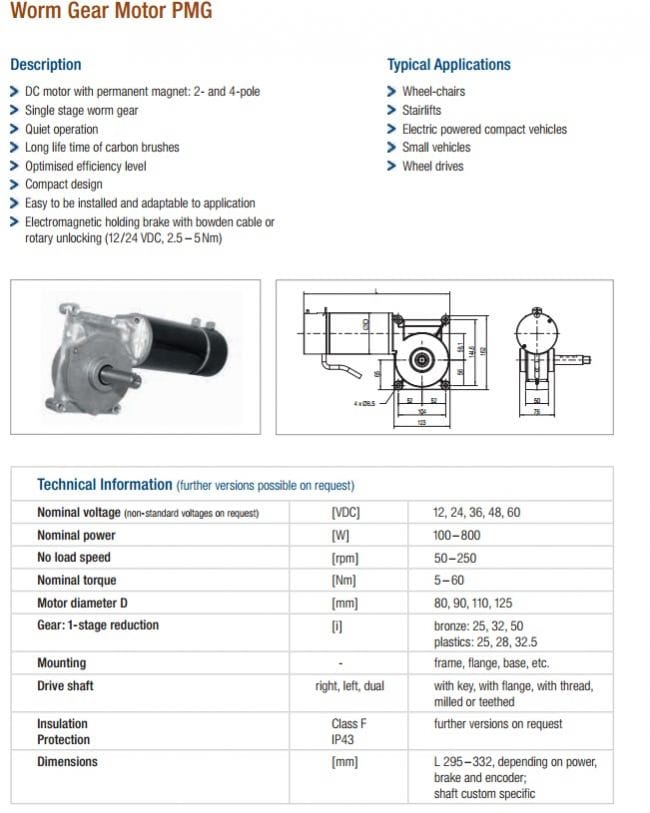
Данный сигвей своими руками имеет два DC двигателя MY1020Z 500 Вт, 24 В, 12,6 Нм.
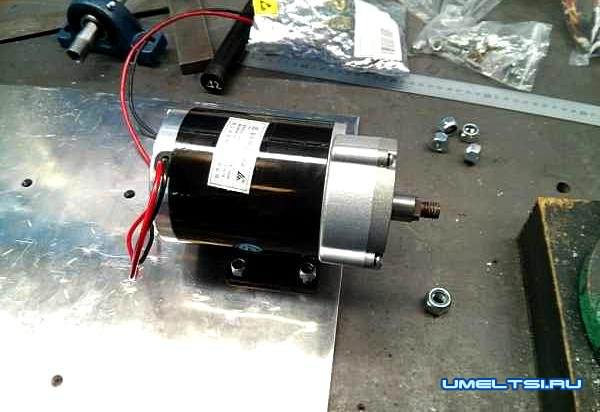
На нижнем изображении – лист алюминия, в котором уже готовы отверстия диаметром 8 мм для монтажа двигателей. Для крепления моторов используются потайные болты.

Следующий шаг заключается в закреплении в центральной части рамы конструкции, которая включает два корпусных узла и стальную водопроводную трубу диаметром 0,5 дюйма и длиной 300 мм.

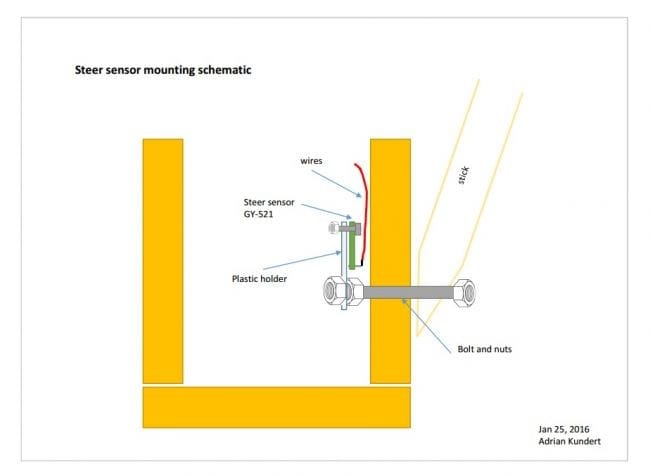
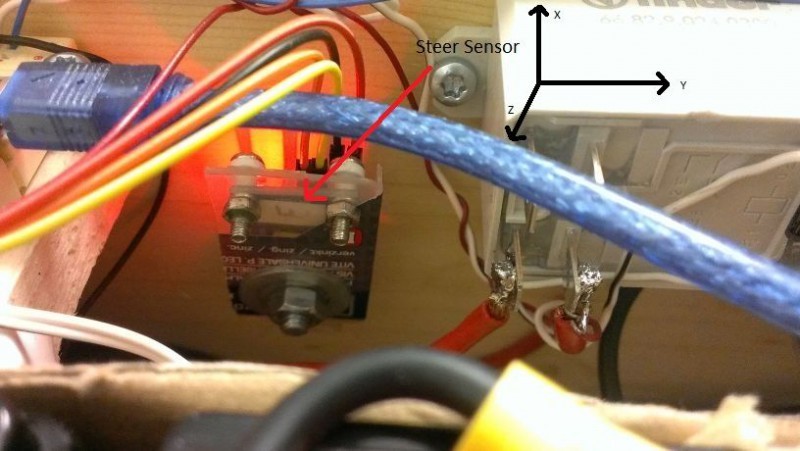
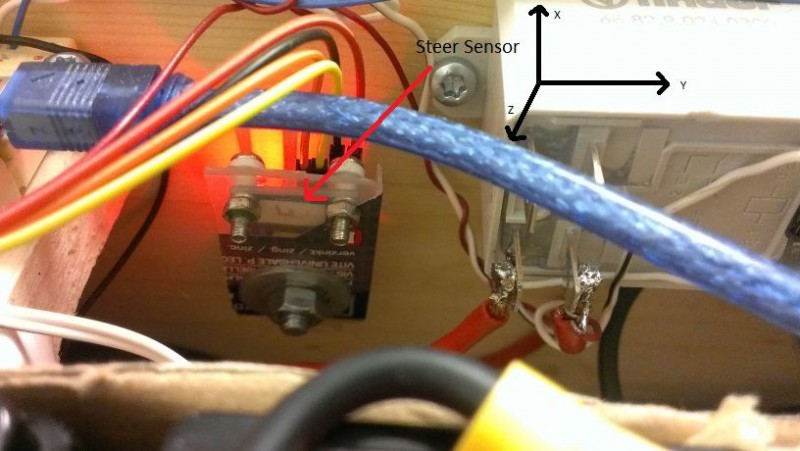
На одной стороне трубы эпоксидным клеем фиксируется потенциометр 10 кОм, который будет определять, в каком положении находится рулевая тяга. На другой стороне потенциометр крепится алюминиевым кронштейном на основании.

С другой стороны, на трубу привариваем угловое соединение с углом 90 градусов.

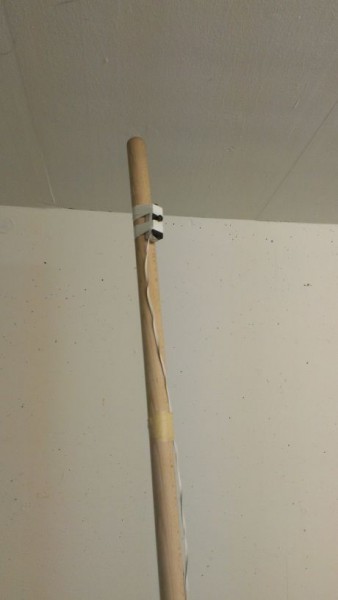
На угловое соединение крепим Т-образную конструкцию, длина которой составляет 105 см. Она будет применяться в качестве руля.

Чтобы отцентрировать рулевой механизм, умелец взял пружины, стоявшие на старой стиральной машине. С одной стороны они прикреплены к основанию, с другой – к трубе хомутами.

Руль оснащен кнопкой безопасности – одна подключена к драйверам двигателей. При езде ее нужно все время удерживать нажатой.

Чтобы установить колеса, мастер изготовил специальную втулку колеса. Следует отметить, что втулка имеет выступающую часть, которая надевается на вал двигателя, что позволяет шестерням оставаться целыми и невредимыми.
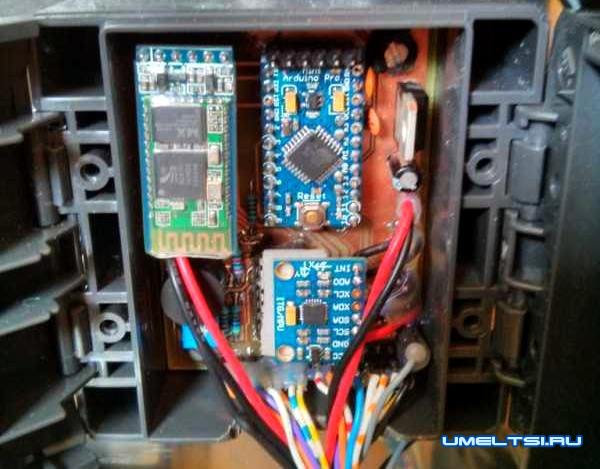
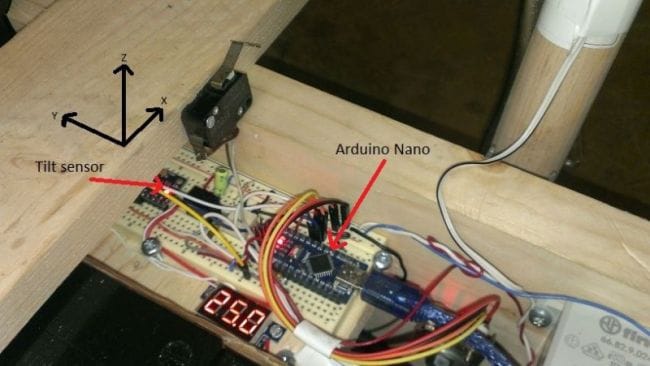
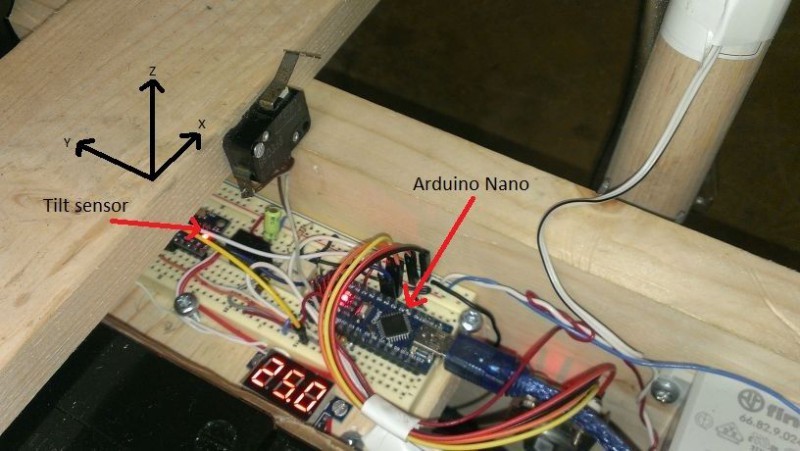
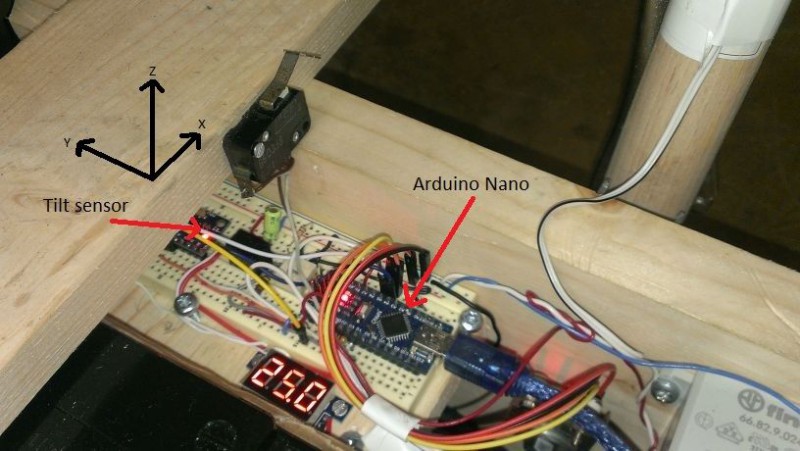
Главный элемент основной платы – Arduino Pro Mini 16 МГц, 5 В. Она позволяет считывать информацию об угле наклона с трех-осевого акселерометра и гироскопа модуля MPU-6050 (частота 500 Гц), которая впоследствии обрабатывается фильтром Калмана.

С микроконтроллером соединен и модель Bluetooth SPP. Используя специальное приложение, он подает данные на смарфтон или другой гаджет под управлением ОС Android.

2 входа операционного усилителя LM324 служат буфером, сохраняя сигнал от кнопки безопасности. С помощью диода D1 видно, что от микроконтроллера на контакт сброса не может поступить сигнал, когда работает драйвер двигателя. Вместе с тем вход Online Casino позволяет сохранить значения измерения напряжения батарей.
Один выход выступает в качестве инверсного усилителя, который усиливает сигнал от потенциометра, подключенного к рулевому механизму. Потенциометр 10 кОм используется с целью изменения напряжения на выходе до примерного показателя 2,5 В.
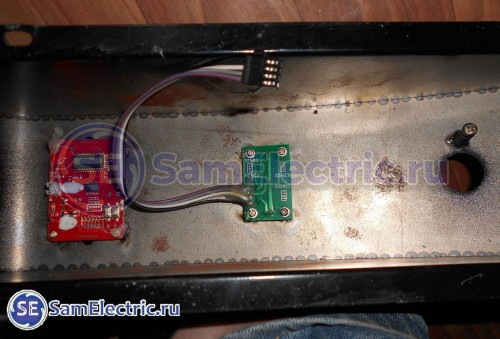
Внизу – изображение с готовой печатной платой и принципиальной схемой. MPU-6050 фиксируется с помощью двойной клейкой ленты, чтобы минимизировать вибрации.
Основная плата включает в себя зуммер, обеспечивающий обратную связь. Он оповещает коротким звуковым сигналом о том, что робот включен, или о том, что заряд батареек уменьшается.

В нашем случае использован драйвер Pololu High-Power Motor Driver 24 В / 23 A. Здесь предусмотрен вариант постоянного тока 23 А без теплоотвода. Те, кто разработали этот аппарат, применили присоединение к драйверам теплоотвода, чтобы увидеть, что для драйверов подходит этот ток, с учетом пикового значения тока для двигателя по характеристикам – 26,7 А. В этом случае не происходит и нагревания драйверов.


Для питания аппарата использовалась установка 3-х 6S LiPo 3000mAh. Если это параллельное подключение, то их общая емкость – 9000 mAh.
От аккумуляторной сборки исходит 25.2 V (4.2 V на банку), нужно было применять преобразователь DC-DC на основе модуля LM2596, чтобы обеспечить показатель напряжения питания контроллера 8 В.
Завершающим шагом создания балансирующего робота мастер поместил всю электронику в корпус из пластика.
Программный код получен на основе кода Balanduino (https://github.com/tkjelectronics/Balanduino), который создан на C/C, при этом использовались библиотеки и функции платформы Arduino.
Чтобы понимать архитектуру, которая используется в программе, можно ориентироваться на блок-схему внизу. Она описывает рабочий алгоритм электронной системы управления.
Как сделать сигвей дома
 Как сделать
Как сделать
Segway: описание конструкции и самостоятельное производство

В век технического прогресса и повального совершенствования, затрагивающего все сферы и отрасли деятельности, современного человека продолжают волновать вопросы, касающиеся модернизации всего, что нас окружает. Одни стараются изо всех сил сделать мир комфортнее, действуя бескорыстно, другие в это время движимы коммерческой выгодой, но в результате вместе они работают на внедрение чего-либо нового и полезного в реальность. Одним из недавних технических изобретений стал Segway, изобретенный Дином Кейменом. Для многих людей segway является новым. Примечательно, что данное изобретение было изобретено всего несколько лет назад, и пока только набирает широкое распространение по всему свету, а поэтому внимание к нему популяризируется с каждым днём.
Segway: определение, интересные факты, описание конструкции и принципа работы Segway
![]()
Примечательно, что каждое колесо вращается посредством работы индивидуального двигателя. Во время наклона корпуса водителя вперед устройство начинает направляться вперед, и по мере увеличения угла наклона корпуса человека скорость увеличивается. Процесс торможения производится в обратном порядке, когда корпус отклоняется в вертикальную позицию. На самом деле управление можно освоить достаточно быстро. Управлять segway можно с помощью поворотной рукоятки, однако новые модели для реализации этого процесса позволяют владельцу только качнуть колонку в стороны.
Гироскутер способен развивать скорость до 20 километров в час. Аккумуляторная батарея позволяет автоматическому самокату двигаться на несколько десятков километров без необходимости зарядки. Максимальный предел нагрузки сигвея составляет порядка 140 килограмм. В современных США сегвей используется активным образом работниками почты, игроками в гольф и другими спортсменами и служащими. Вдобавок ко всему сигвей служит отличным развлечением в городских парках, добавляя массу позитивных эмоций от катания на свежем воздухе.
Несмотря на то, что гироскутер является достаточно дорогостоящим аппаратом, получить его в собственное владение и впоследствии получать наслаждение от езды на подобном автоматическом самокате вполне возможно с минимальными финансовыми вложениями. Ниже постараемся разобраться, как сделать сигвей своими руками, при этом, не потратив много средств. Однако стоит знать, что на некоторые финансовые растраты все же придется пойти.
Как сделать сигвей своими руками?
Для удобства понимания процесса сборки сигвея самостоятельно ниже предлагаются несколько этапов последовательности действий по каждому из них. Но для начала стоит обзавестись некоторыми инструментами и материалами, общая стоимость которых обойдется в несколько сотен евро.
Оборудование, материалы, электроника:
Выше предложен перечень всех компонентов, материалов, инструментов, необходимых для создания увлекающего внимание двухколесного транспортного средства. Сегвей окажется отличным решением и средством для времяпрепровождения людьми с нестандартными интересами. Разумеется, в зависимости от региона проживания набор оборудования, расходных материалов и электроники может стоить по-разному, но средняя цена всего этого выльется в 350$. Для сравнения стоит сказать, что стоимость настоящего нового сигвея обойдется Вам гораздо дороже, поскольку автоматический производственный самокат стоит несколько тысяч долларов. Так что, есть, за что стараться работать над полезным приспособлением.
Segway: механическая составляющая, электроника и ПО
Для удобного понимания процесса изготовления сигвея собственноручно, как уже было сказано, ниже предлагаются этапы алгоритмов действий. Сначала следует механика, как основа всей конструкции.
Последовательность работы по созданию механики:
С механической стороной нашего устройства можно разобраться, потратив некоторое время. Еще для того, чтобы сделать сигвей, понадобится уделить внимание оснащению транспорта электроникой. Электроника — важная составляющая каждого сигвея, а поэтому отнеситесь к работе ответственно и внимательно!
Последовательность оснащения электроникой:
Если Ваши отношения с электроникой и механикой достаточно сложны, понадобится набраться терпения и постараться разобраться в устройстве и построении рассматриваемой конструкции. В конце трудов Вы обязательно получите моральное удовлетворение от проделанной работы, получите возможность насладиться поездкой на сигвее. Теперь стоит приблизиться к наделению сигвея программным обеспечением.
Последовательность работы с наделением устройства программным обеспечением:
Механика, электроника, ПО – все эти шаги требуют от домашнего мастера некоторой сноровки и понимания тематики. При сильном желании сделать segway своими руками в домашних условиях, можно позвать на помощь интересующихся друзей: вместе Вы получите больше шансов на получение предмета ожидаемого результата.

Видео. Как делают Segway (Гироскутер)
Segway (гироскутер) своими руками
В этой статье будет рассмотрено создание самобалансирующегося средства передвижения или просто «Сегвей». Практически все материалы для создания данного устройства легкодоступны.
Само устройство представляет из себя платформу на которой стоит водитель. Путем наклона туловища осуществляется управление двумя электрическими двигателями посредством цепи схем и микроконтроллеров, отвечающих за балансировку.

-Беспроводной модуль управления XBee.
-микроконтроллер Arduino
-аккумуляторы
-датчик InvenSense MPU-6050 на модуле “GY-521”,
-деревянные бруски
-кнопка
-два колеса
и прочее, указанное в статье и на фотографиях.
Шаг первый: Определение требуемых характеристик и проектирование системы.
При создании этого устройства автор старался, чтобы оно укладывалась в такие параметры как:
-проходимость и мощность, необходимая для свободного перемещения даже по гравию
-аккумуляторы достаточной емкостью, чтобы обеспечить как минимум один час беспрерывной работы устройства
-обеспечить возможность беспроводного управления, а так же фиксирование данных о работе устройства на SD-карту для выявления и устранения неисправностей.
Кроме того желательно, чтобы затраты на создание подобного устройства были меньше чем заказ оригинального внедорожного гироскутера.
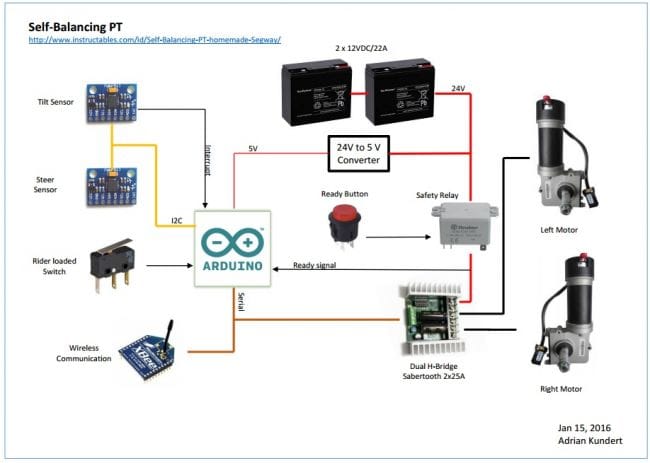
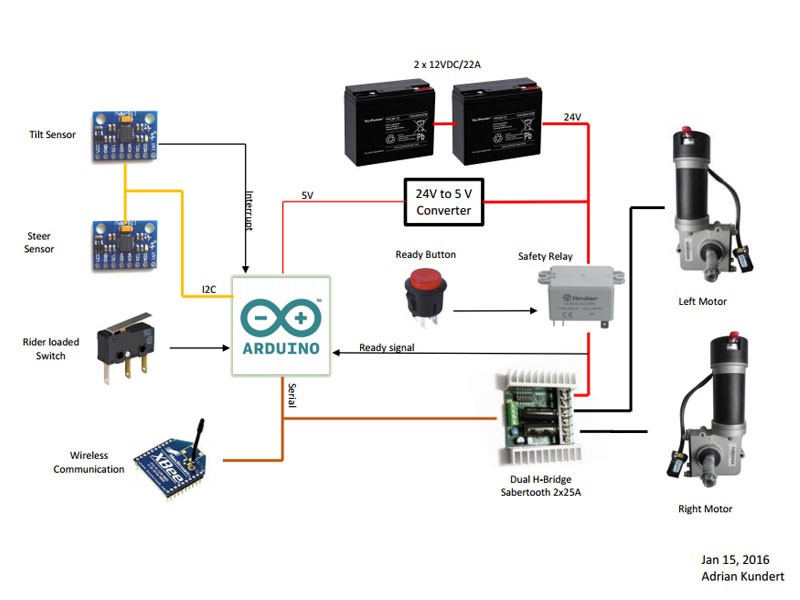
Согласно приведенной ниже диаграмме, вы можете увидеть схему электрической цепи самобалансирующегося транспортного средства.
Выбор микроконтроллера для управления системами Сегвея разнообразен, автор система Arduino наиболее предпочтительна из-за своих ценовых категорий. Подойдут такие контроллеры как Arduino Uno, Arduino Nano или можно взять ATmega 328 для использования в качестве отдельного чипа.
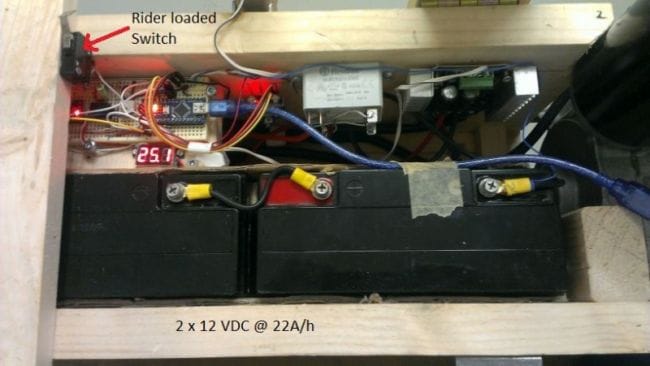
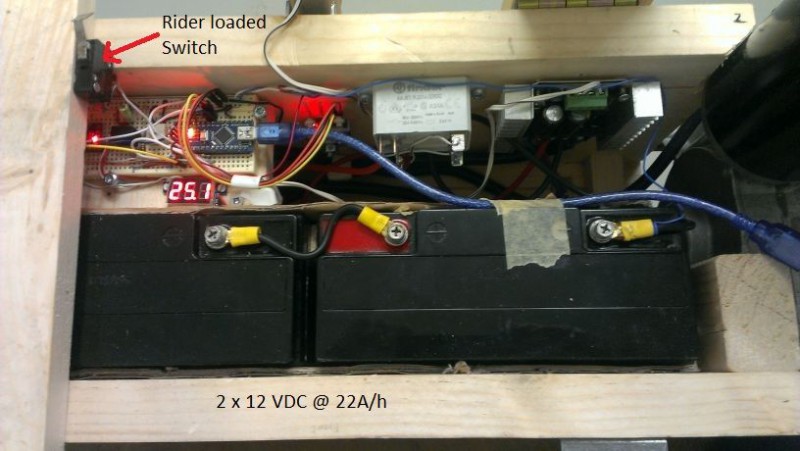
Чтобы запитать сдвоенную мостовую схему управления двигателей необходимо напряжение питания в 24 В, этого напряжения легко достигнуть путем последовательного подключения 12 В автомобильных аккумуляторов.
Система построена так, что питание на двигатели подается, только пока нажата кнопка старта, поэтому для быстрой остановки достаточно просто ее отпустить. При этом платформа Arduino должна поддерживать последовательную связь, как с мостовой схемой управления двигателей, так и с беспроводным модулем управления.
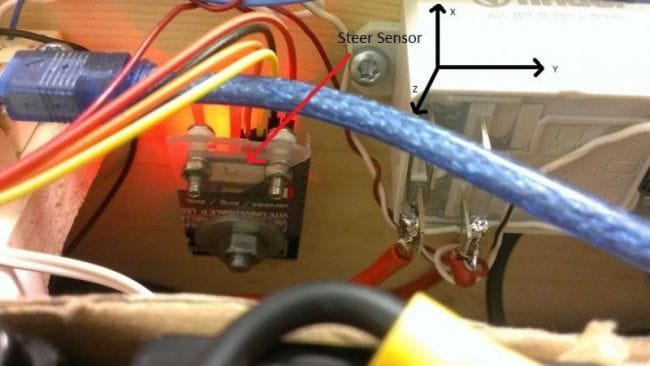
За счет датчика InvenSense MPU-6050 на модуле “GY-521”, обрабатывающего ускорение и несущего в себе функции гироскопа, измеряются параметры наклона. Датчик был расположен на двух отдельных платах расширения. По шине l2c поддерживается связь с микроконтроллером Arduino. Причем датчик наклона с адресом 0x68 был запрограммирован таким образом, чтобы выполнять опрос каждый 20 мс и обеспечивать прерывание микроконтроллера Arduino. Другой датчик имеет адрес 0x69 и он подтянут прямо к Arduino.
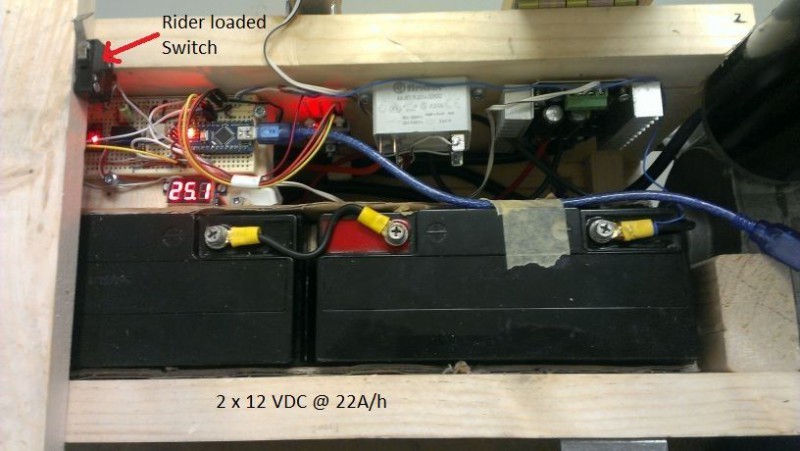
Когда пользователь встает на платформу скутера, срабатывает концевой выключатель нагрузки, который и активирует режим алгоритма для балансировки Сегвея.
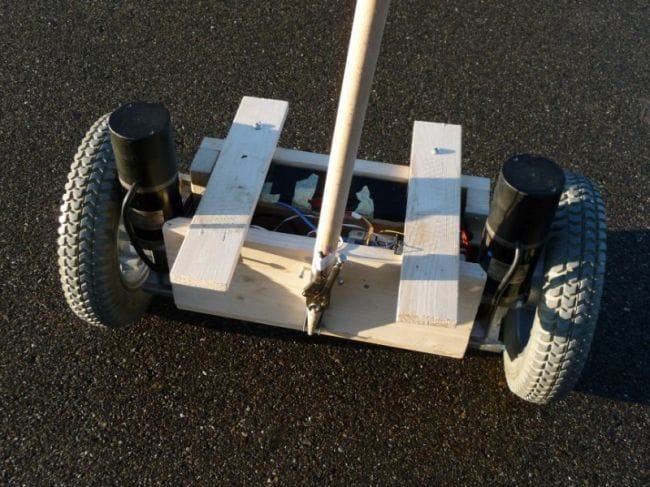
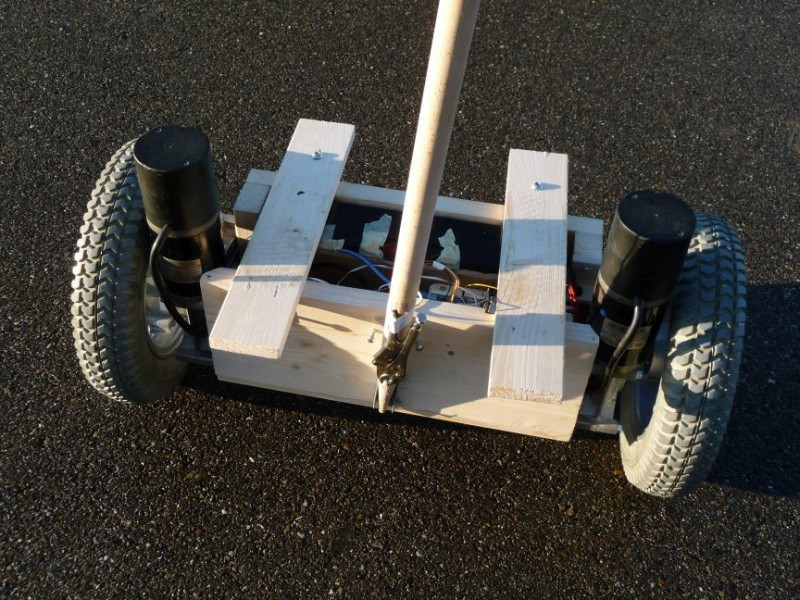
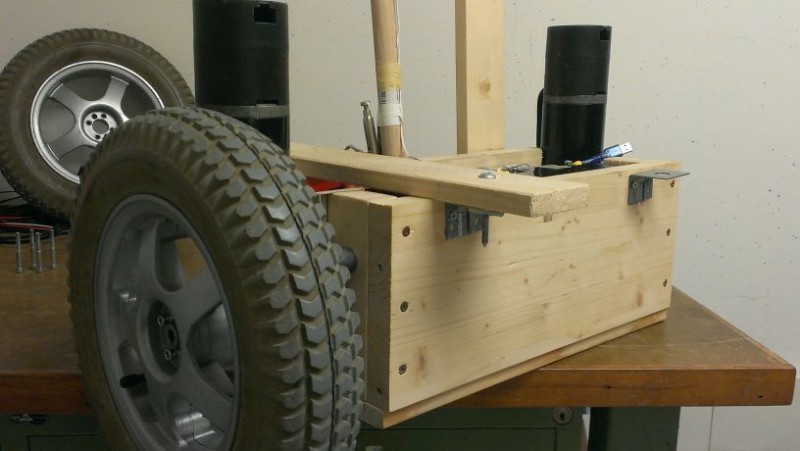
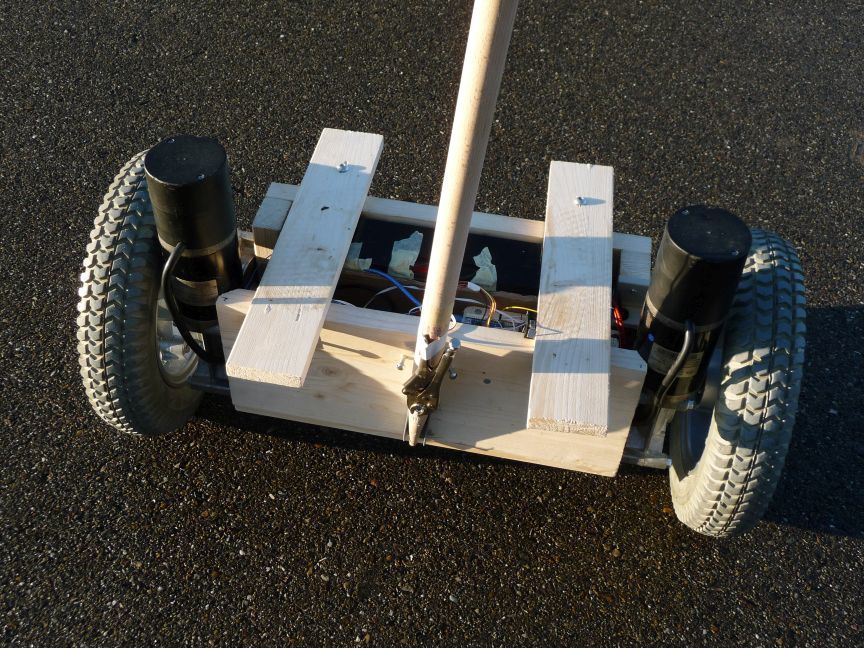
Шаг второй: Создание корпуса гироскутера и установка основных элементов.



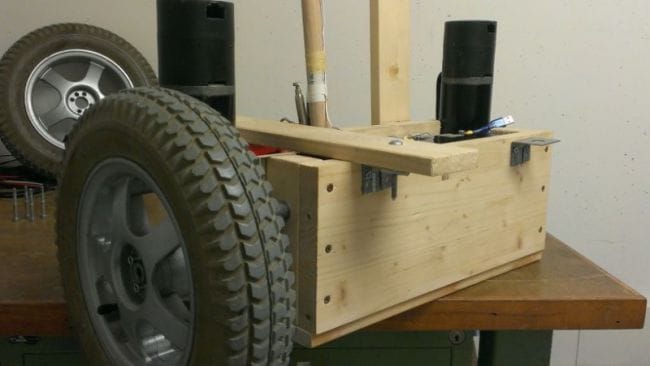


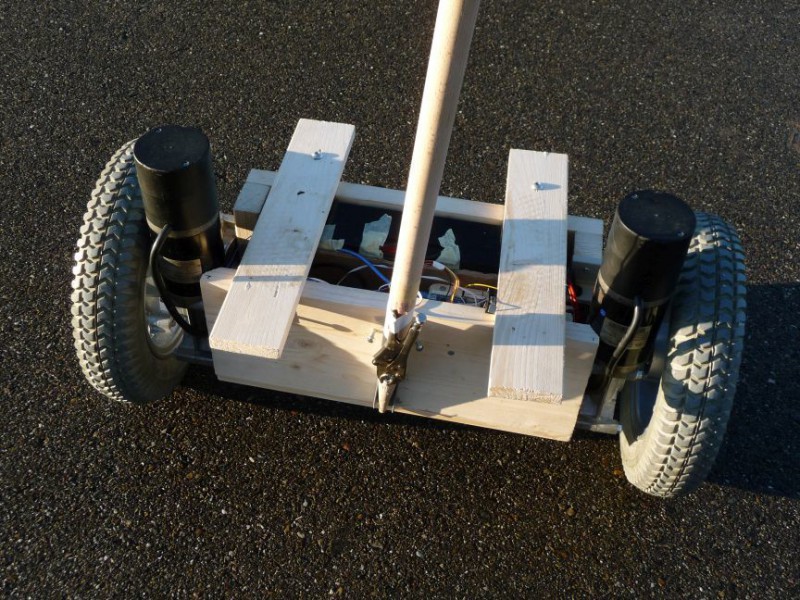
После определения основной концепции схемы работы гироскутера, автор приступил к непосредственной сборке его корпуса и установке основных деталей. В качестве основного материала послужили деревянные доски и бруски. Дерево мало весит, что положительно отразится на длительности заряда аккумуляторов, кроме того древесина легко обрабатывается и является изолятором. Из этих досок был сделан короб, в который будут устанавливаться аккумуляторы, двигатели и микросхемы. Таким образом, получилась U-образная деревянная деталь, на которую за счет болтов крепятся колеса и двигатели.
Передача мощности двигателей на колеса будет идти за счет зубчатой передачи. Во время укладки основных компонентов в корпус Сегвея очень важно проследить, чтобы вес распределялся равномерно при приведении Сегвея в рабочее вертикальное положение. Поэтому если не учесть распределение веса от тяжелых аккумуляторов, то работа балансировки устройства будет затруднена.
В данном случае автор расположил аккумуляторы сзади, так, что компенсировать вес двигателя, который находится в центре корпуса устройства. Электронные составляющие устройства были уложены в место между двигателем и аккумуляторами. Для последующего тестирования так же была прикреплена временная кнопка старта на ручке Сегвея.
Шаг третий: Электрическая схема.

Шаг четвертый: Тестирование и настройка устройства.
После проведения предыдущих этапов, автор получил модель Сегвея для тестирования.
При проведении тестирования важно принять во внимание такие факторы как безопасность зоны тестирования, а так же защитная экипировка в виде защитных щитков и шлема для водителя.
Начать тестирование Сегвея автор решил с загрузки кода на микроконтроллер и проверки его связи со схемами управления и датчиками.
После проведения настройки регулятора на контроллер подается питание, и датчики переходят в состояние ожидания. Затем нажимается кнопка старта, и включаются двигатели. Путем наклона Сегвея водитель управляет движением за счет работы алгоритма балансировки.
На видео ниже показана работа собранного устройства гироскутера:
Как сделать гироскутер своими руками в домашних условиях?
Что такое гироскутер?
Эти датчики считывают любое изменение положения относительно земной поверхности или точки от которой идет гравитационное воздействие. После считывания, информация подается на вспомогательные платы, которые находятся по обе стороны платформы. Так как датчики и сами электродвигатели работают независимо друг от друга, то в дальнейшем нам понадобятся два электродвигателя. От вспомогательных плат, информация в обработанном виде уже идет в материнскую плату с микропроцессором. Там уже с необходимой точностью выполняется программа удержания баланса.
То есть если платформа наклоняется вперед, примерно на несколько градусов, то двигателям подается сигнал на движение в обратное направление и платформа выравнивается. Также выполняется и наклон в другую сторону. Если же гироскутер наклоняется на больший градус, то программа сразу же понимает, что идет команда о движении вперед или назад электродвигателям. Если гироскутер наклоняется больше чем на 45 градусов, то двигатели и сам гироскутер отключается.
Гироскутер состоит, из корпуса, стальной или металлической основы, на который и будет крепится вся электроника. Дальше идет два электродвигателя с той мощностью, чтобы была возможность ездить под весом человека до 80-90кг. Дальше идет материнская плата с процессором и две вспомогательные платы, на которых как раз и стоят гироскопические датчики. И конечно же аккумулятор и два колеса с одинаковым диаметром. Как сделать гироскутер? Для решения этого вопроса, нам понадобится добыть определенные детали конструкции самого гироборда.

Двигатели с колесами
Что же нам понадобится?
Как сделать гироскутер своими руками? Первое и основное что понадобится, это два электрических двигателя, с мощностью способных перевозить вес взрослого человека. Средняя мощность у заводских моделей составляет 350 Ватт, поэтому постараемся найти двигатели такой мощности.
Дальше конечно же нужно найти два одинаковых колеса, примерно 10-12 дюймов. Лучше побольше, так как электроники у нас будет много. Чтобы проходимость была выше и расстояние между платформой и землей было на нужном уровне.
Два аккумулятора, свинцово-кислотных, нужно выбрать номинальную мощность как минимум 4400 мА/ч, а лучше больше. Так как мы будем делать не металлическую конструкцию, но она будет весить больше чем оригинальный мини-сигвей или гироскутер.
Производство и процесс
Как сделать гироскутер, мощный и чтобы он сам держал баланс при езде? Сначала нужно построить план, какое именно средство передвижения нам понадобится. Нам нужно сделать довольно мощное средство передвижения с большими колесами и большой проходимостью по разным дорогам. Минимальное значение беспрерывной езды должно составлять 1-1.5 часа. Мы потратим примерно около 500 евро. Поставим беспроводную систему управления нашему гироскутеру. Поставим считывающее устройство неполадок и ошибок, вся информация будет идти на SD-карту.
На схеме выше можно все четко увидеть: электродвигатели, аккумуляторы и прочее. Для начала нужно выбрать именно тот микроконтроллер, который и будет осуществлять управление. Из всех представленных на рынке микроконтроллеров Arduino мы с вами выберем UnoNano, и в качестве дополнительного чипа обработки информации будет выступать ATmega 328.
Но как сделать гироскутер безопасным? Два аккумулятора у нас будут подсоединены последовательно, так мы получим нужное напряжение. Для электродвигателей, как раз и понадобится сдвоенная мостовая схема. Будет поставлена кнопка готовности, по нажатию которой и будет поступать питание на двигатели. При отжимании этой кнопки, двигатели и сам гироскутер будет отключаться. Нужно это для осуществления безопасной езда самого водителя и нашего средства передвижения.
Микроконтроллер Arduino будет на скорости около 38400 БОД, использовать последовательную связь со схемой XBee. Мы будем использовать два гироскопических датчика InvenSense MPU 6050 на базе модулей GY-521. Они в свою очередь будут считывать информацию о положении платформы. Эти датчики достаточно точны для того, чтобы сделать мини-сигвей. Эти датчики будут расположены на двух дополнительных вспомогательных платах, которые будут осуществлять первичную обработку.

Мы будем использовать шину I2C, она имеет достаточную пропускную способность, чтобы быстро связывать с микроконтроллером Arduino. Гироскопический датчик имеющий адрес 0x68 имеет частоту обновления информации раз в 15 мс. Второй же датчик адресов 0x68 работает напрямую от микроконтроллера. У нас так же есть выключатель нагрузки, он переводит гироскутер в режим удержания баланса, тогда когда платформа находится в ровном положении. В этом режиме гироскутер остается на месте.

Три деревянные детали, на которых и будет располагаться наши колеса и электродвигатели. Рулевой столб, сделан из обычной деревянной палки он будет крепиться к передней части самого гироскутера. Тут можно взять любую палку, даже черенок от швабры. Нужно обязательно учесть тот факт, что аккумуляторы и другие схемы, будут производить давление на платформу и тем самым балансировка будет немного перенастроена, именно в ту часть, где будет больше давление.
Устанавливка гироскопического датчика
Двигатели же нужно равномерно распределить справа и слева по бокам платформы, а аккумулятор максимально посередине в специальной коробке. Крепим рулевой столб на обычные финты и присоединяем кнопку готовности к верхней части палки. То есть если что-то пошло не так и кнопка отжата, то гироскутер будет выключаться. В дальнейшем эту кнопку можно переделать в подножную часть или настроить на определенный наклон самой платформы, но мы пока делать этого не будем. Закажите доработку сайтов вордпресс здесь.
Устанавливаем на плату микроконтроллер
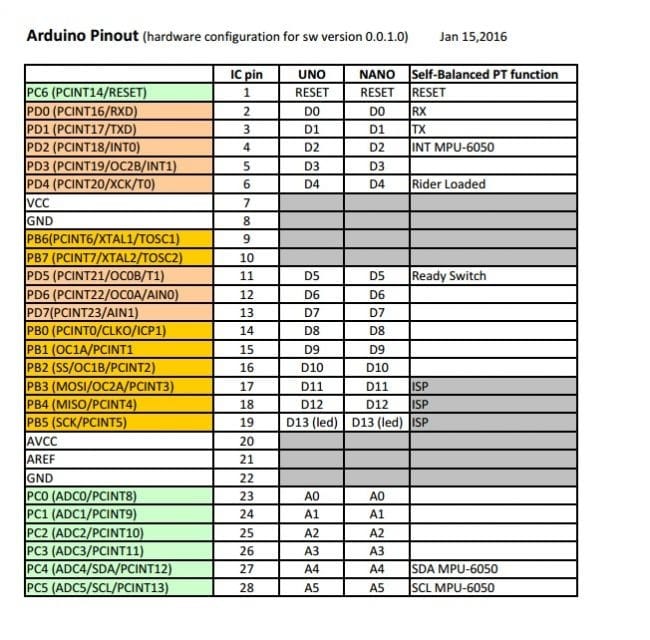
Внутренняя схема и спайка всех проводов, производится по той же схеме. Дальше нужно подключить два гироскопических датчика к нашему микроконтроллеру, по мостовой схеме с двигателем, по данной таблице.
Датчики балансировки должны быть установлены параллельно земле или вдоль самой платформы, а вот датчики поворота направо и налево должны быть установлены перпендикулярно гироскопическим датчикам.

Настройка датчиков
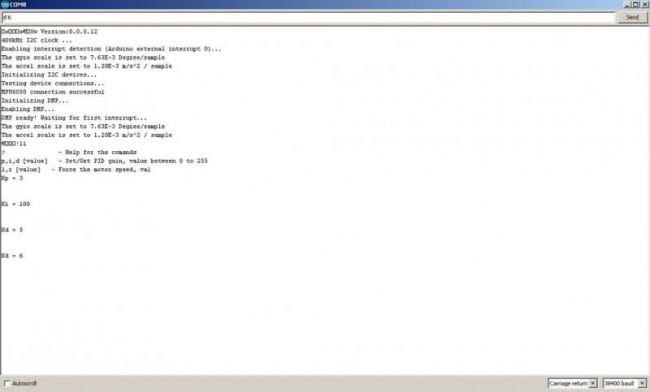
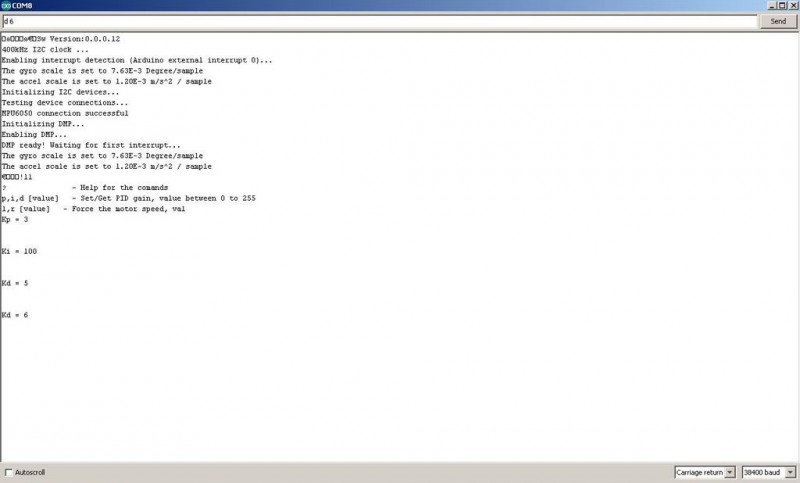
Дальше производим настройку микроконтроллера, загружаем исходный код. Дальше нужно проверить правильную взаимосвязь между гироскопическими датчиками и датчиками поворотов. Используйте программу Arduino Terminal по программированию и настройке гироскутера. Обязательно нужно настроить ПИД регулятор баланса. Дело в том, что вы можете выбрать двигатели с другой мощностью и характеристиками, для них настройка будет другой.
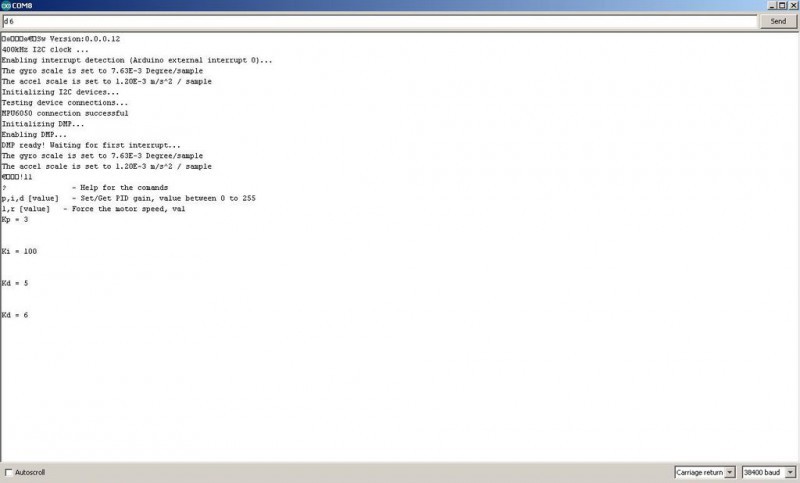
Программа Arduino Terminal
Есть несколько параметров в этой программе. Первый самый главный параметр, это параметр Kp, он отвечает за балансировку. Сначала увеличьте этот показатель, для того чтобы ввести гироскутер в нестабильный вид, а потом уменьшайте показатель до нужного параметра.
Дальше вы включаете кнопку включения микроконтроллера Arduino и гироскутер переходит в режим ожидания. После того как вы встали на сам гироборд, вы встаете ногами на нажимную кнопку, так гироскутер переходит в режим «на месте». Включаются датчики балансировки и при изменении угла наклона, гироскутер едет вперед или назад. При каких либо поломках, можно без проблем осуществить ремонт гироскутера своими руками.
Как сделать самодельный сигвей
 Как сделать
Как сделать
Как изготовить своими руками сегвей
В этом видео уроке показано, как изготовить самодельный сигвей, как оказалось, его можно сделать своими руками. Это предварительная модель, которая делается без гироскопа и Ардуино, поэтому необходимо ее доработать, что автор и собирается сделать на одном из этапов. Еще очень интересная модель электросамоката тут.
Сегвей своими руками

Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.

Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Как сделать самодельный сигвей




Для определения текущего угла я сначала использовал отдельный акселерометр (ADXL335) и гироскоп (LY530AL). На прошлой неделе я изменил комплектацию, и две платы были заменены на MPU6050.sensor, который объединяет эти два элемента.
Преимущество гироскопа заключается в том, что ускорения не влияют на измерения. Недостатком является то, что гироскоп имеет смещение, и через некоторое время угол поднимается все выше и выше.
Преимущество акселерометра заключается в том, что он не показывает никакого смещения, такого как гироскоп. Но на это влияют ускорения, которые меняют Вывод.
Шаг 4: ПИД-контроллер.


Сегвей пытается добиться угла в 0 °. Если угол положительный, сегвей тормозит или ускоряется назад. Если это отрицательно, Сегвей ускоряется вперед.
Но какой сигнал должны получить двигатели? Это задача для ПИД-Контроллера.
Пропорциональная-часть (proportional-part): угол должен быть 0 °. Таким образом, чем больше угол, тем выше скорость двигателей.
Математически вы можете написать:
p-Motor-value = k_p * angle_error
Математически вы можете написать:
error_sum_new = error_sum_old + error
i-motor-value = k_i * (error_sum_new)
Математически вы можете написать:
d-motor-value = k_d * angular
Speed Finally you get: motor-value = p-motor-value + i-motor-value + d-motor-value
Шаг 5: Финал.






Теперь пришло время испытать сегвей. Чтобы двигаться не только прямо, вам нужно установить две кнопки. Когда вы нажимаете f.e. правый, левый двигатель увеличивает скорость, а правый двигатель замедляется. Чтобы обеспечить плавные переходы, добавленное и вычитаемое значение начинается с нуля и увеличивается шаг за шагом (+0,5 за каждый цикл), пока он не достигнет максимального значения (т. Е. 30).
Чтобы испытать свой собственный segway, я прикрепил простую программу для Вас. Удачи.
Сегвей своими руками

Привет всем мозгочинам! В моем новом мозгопроекте я буду создавать своими руками самобалансирующееся транспортное средство или «Сегвей». Для данного проекта нужны базовые знания в электронике и умение работать вручную. Все механические компоненты можно приобрести в сети Интернет или в местном магазине.
СЕГВЕЙ состоит из платформы, на которой стоят в вертикальном положении, и двух боковых электродвигателей, приводимых в действие с помощью аккумуляторов. Алгоритм контроллера управления обеспечивает устойчивое положение. Перемещение сегвея контролируется водителем путем наклона его туловища, и ручкой для выбора направления движения влево/вправо. Поэтому вам понадобятся дополнительные компоненты, такие как контроллер, привод двигателя и датчик ускорения/гироскоп. Механическая конструкция изготовлена из дерева, поскольку оно имеет легкий вес, электрически изолировано и легко поддается обработке. Теперь приступим к изготовлению сегвея!
Шаг 1: Основные характеристики проекта
В настоящем проекте требуется изготовить устройство со следующими характеристиками:
— Достаточная мощность и устойчивость для езды по улице, и даже по гравийной дорожке;
— 1 час непрерывной работы
— Общая стоимость до 500€ евро
— Возможность беспроводного управления
— Запись данных на SD-карту для выявления поломок
Шаг 2: Проектирование системы

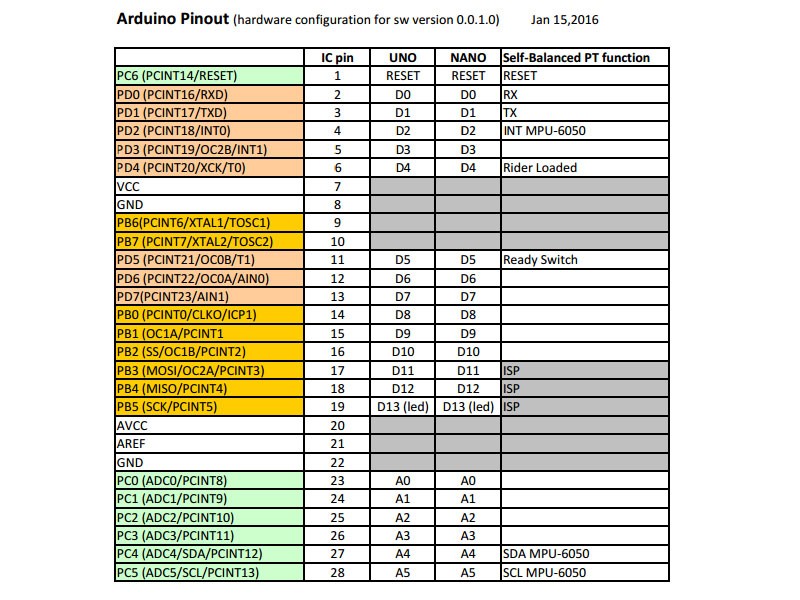
На прилагаемой диаграмме показана электрическая схема сегвея и привода двигателя. В качестве микроконтроллера Arduino можно выбрать Uno, Nano или ATmega 328 как отдельный чип. Аккумуляторы подключены последовательно, чтобы получить напряжение 24 В, необходимое для питания сдвоенной мостовой схемы управления для двигателей. Питание подается, пока водитель удерживает нажатой кнопку «ready». Для аварийного останова отпустите данную кнопку. При этом снимается питание с двигателей. Arduino использует последовательную связь в «пакетном» режиме на скорости 38 400 бод с мостовой схемой управления и беспроводным модулем XBee. Параметры наклона и управления измеряются с помощью датчика ускорения/гироскопа InvenSense MPU-6050 на модуле “GY-521”, располагаемого на 2 отдельных платах расширения. Связь с микроконтроллером Arduino происходит по шине I2C. Датчик наклона (адрес 0x68) запрограммирован на выполнение опроса каждые 20 мс и обеспечивает прерывание микроконтроллера Arduino. Второй датчик (адрес 0x69) «подтянут» к Arduino. Концевой выключатель нагрузки определяет, когда водитель становится на платформу, чтобы активировать алгоритм балансировки СЕГВЕЯ.
Шаг 3: Конструкция каркаса





Колеса и двигатели с зубчатой передачей прикрепляются винтами на трех деревянных деталях, собранных в U-образной форме. Ручка представляет собой деревянную палку, удерживаемую болтом в передней деревянной детали. Важно, чтобы распределение веса СЕГВЕЯ происходило равномерно при вертикальном положении, которое является положением проезда. Поэтому необходимо учесть тяжелые компоненты, такие как аккумуляторы. В противном случае алгоритм балансировки может быть затруднительным.
В нашем случае аккумуляторы располагаются в задней части деревянной коробки для компенсации веса двигателя, располагаемого в центре. В промежутке между ними располагаются остальные электронные компоненты.
К ручке изолентой прикреплена нажимная кнопка готовности движения “rider ready”.
Шаг 4: Электрическая схема

Проводка в деревянной коробке расположена в соответствии со схемой. Подключите выводы микроконтроллера Arduino к датчикам, мостовой схеме управления и двигателям в соответствии с представленной таблицей.
Датчик наклона установлен горизонтально вдоль оси х, а датчик управления вертикально вдоль оси у.
Шаг 5: Тестирование и настройка
Примите во внимание, что двигатели должны иметь достаточную мощность. Проверьте устройство в широкой и безопасной зоне, чтобы избежать получения травм или повреждений. Рекомендуется надевать защитные щитки и шлем.
Выполните пошаговую процедуру. Начните с программирования микроконтроллера Arduino (загрузите исходный код), далее проверьте связь с датчиками и мостовой схемой управления.
Arduino Terminal может использоваться для отладки программного кода и проверки работоспособности. Например, нужно настроить усиление ПИД-регулятора, поскольку оно зависит от механических и электрических параметров двигателя.
Усиление настраивается по данной процедуре:
1. Параметр Kp предназначен для балансировки. Увеличивайте Kp, пока балансировка станет нестабильной, Ki и Kp остаются 0. Незначительно снизьте Kp для получения устойчивого состояния.
2. Параметр Ki предназначен для ускорения/снижения ускорения при наклоне. Увеличьте Ki для получения правильного ускорения, чтобы избежать падения при наклоне вперед, Kp остается 0. Теперь балансировка должна стать стабильной.
3. Параметр Kd используется для компенсации включения и возврата к устойчивому положению.
После подачи питания на Arduino выполняется инициализация датчиков и переход в состояние ожидания. При нажатии нажимной кнопки происходит передача управляющего сигнала в контроллер СЕГВЕЯ, находящегося в вертикальном положении, который готов для активации двигателей для перемещения вперед или назад в зависимости от первоначального положения. С этого момента кнопку нужно держать нажатой постоянно, в противном случае двигатели выключатся, и контроллер перейдет в состояние ожидания. После достижения вертикального положения, контроллер ожидает сигнал концевого выключателя нагрузки “Водитель на месте”, который обычно нажимают ногой, когда водитель находится на платформе. После этого запускается алгоритм балансировки и происходит активация двигателей вперед или назад для того, чтобы остаться в вертикальном положении. Наклон вперед создает поступательное движение вперед и наоборот. Нахождение в наклоненном положении приводит к ускорению движения. Наклон в противоположном направлении приводит к снижению скорости. Для перемещения влево и вправо используйте ручку.
Шаг 6: Демо

Смотрите ниже видео готового устройства и спасибо за внимание!
Сигвей – устройство и ремонт

Китайский сигвей – фото внешнего вида
До недавнего времени я вообще не знал, как называется “ну, такая каталка на двух колёсах, ехать стоя”. Недавно узнал, что этот электросамокат на двух колесах называется Сегвей или Сигвей, по-английски – Segway. Кто до сих пор не понял, о чем речь – фото слева.
Подробнее об этом замечательном двухколесном самокате можно узнать в википедии или на сайтах продавцов, я же опишу его коротко, и перейду к главному – устройству и ремонту сигвея. Будет много фото, а также подробное описание электрической схемы сигвея.
Существует младший брат сигвея – гироскутер, или мини-сигвей. Чем они отличаются, я подробно рассказываю в этой статье.
Это замечательное устройство позволяет человеку легко передвигаться на двух колёсах. При этом в систему управления сигвеем входит система балансировки, практически исключающая возможность падения.
Слово “практически” меня всегда настораживает. Так и в этот раз.
Но обо всём по порядку.
Поломка сигвея
Моя история началась как раз с того, что человек на сигвее упал. Ехал на приличной скорости, и – носом в асфальт!

Контакты замка включения питания
Странно, что контакты не пригорели и не слиплись намертво, впрочем, тогда бы выгорела проводка, т.к. при токе около 100 Ампер защитного автомата предусмотрено не было, а штатные предохранители остались целы.
Да, стоит сказать, что этот сигвей был дешевой подделкой, и куплен дней за десять до поломки. Всё было написано по китайски (насколько я разбираюсь в китайском), кроме “Warning!” Впрочем, о качестве сборки можно будет судить по фото.
Причина поломки – сгорели силовые транзисторы, через которые питались двигатели. Но об этом подробнее чуть позже.
Устройство сигвея. Разборка
Что мне конкретно понравилось – это колёса с солидными протекторами. То есть, предполагается, что этот самокат может использоваться в тяжелых условиях.

Устройство и ремонт сигвея, фото. Колесо
Однако, платы вообще не защищены от воздействия влаги, нет даже никакого лака. И вообще никаких резиновых прокладок от влаги не предусмотрено…
Руль прикручивается, его можно открутить при транспортировке:

Крепление руля. Вид спереди.

Предохранители и разъем зарядки
Видно два предохранителя по 50 А (схема сигвея будет чуть ниже), разъем заряда аккумулятора, над всем этим – “фары” в виде светодиодов на 12 В.
Верхняя панель. На ней – основные органы управления и индикации:

Верхняя панель сигвея
Вверху – дисплей, который показывает заряд батареи, ниже – предупреждения, которые необходимо внимательно прочитать, прежде чем становиться за руль. Если что непонятно – позвонить по телефону)
Три светодиода индицируют состояние сегвея: 1 – поворот влево, 2 – поворот вправо, 3 – горизонтальное положение (положение, в котором человек может становиться и начинать движение)
Далее – ещё текст на китайском, потом замок с ключом, фото контактов которого я публиковал выше.


Сигвей со снятыми колесами
Снимаем переднюю панель.

Снимаем верхнюю крышку
Выглядит весьма непрезентабельно, но это только начало.
Передняя панель сзади. Провода откинуты. Замок снят.
К рулевой колонке рулю, который поворачивается только вправо и влево, приделан переменный резистор, распознающий наклон руля, и дающий сигнал контроллеру на поворот.

Переменный резистор наклона руля
Сопротивление – 10 кОм, линейная характеристика.
Разбираем далее, вот внутренности.
Так и хочется сказать – “потроха”

Как я уже говорил, качество сборки отвратительное. Хотя, по механике особых претензий нет.
Электронная начинка сигвея
Теперь подробнее рассмотрим электронику сигвея.
Вот фото подключения платы управления.

Устройство крупнее и подключение платы
Силовые транзисторы – IRF4110:
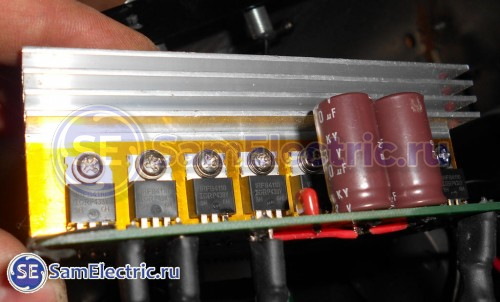
Силовые транзисторы платы управления
Именно парочка этих транзисторов и сгорела. При этом эта пара замкнула на себя питание аккумулятора, образовав КЗ.

Электронная схема сигвея – общий вид
Рассмотрим элементы схемы подробнее.

Электронная схема сигвея – общий вид – другой ракурс
Схема в общем не большая, разобьем её на несколько частей – приемник, контроллер, электронный гироскоп, драйвера транзисторов, силовые транзисторы, блок питания.
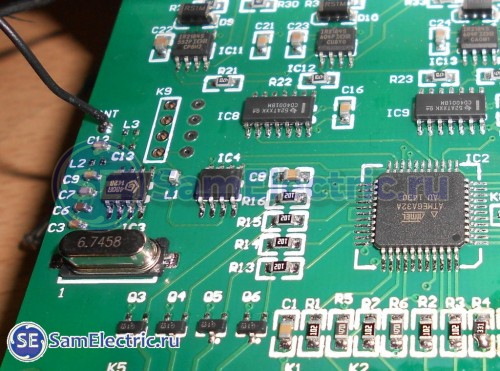
Приемник и контроллер. Фото крупным планом
Микросхемки IC3, IC4 – это радиоканал, который позволяет управлять сигвеем с пульта. То есть, настраивать его, калибровать, блокировать, диагностировать.
Микросхема IC2 – контроллер ATMEGA 32A. Это сердце сигвея, точнее, мозг. Тут заложено самое главное – программа, алгоритм работы. Именно эта программа управляет вращением колёс и не дает человеку упасть.

Контроллер и электронный гироскоп
Если контроллер – мозг, то гироскоп – это органы чувств. Гироскоп – это маленькая микросхемка INVENSENCE MPU6050. Это замечательное устройство представляет собой трехканальный измеритель положения в пространстве (наклон по трем осям) и трехканальный измеритель ускорения. Если кто помнит из физики, ускорение – это скорость изменения скорости. Честно, не понимаю, как в этот чип можно впихнуть такие измерители. Я до сих пор знал электромеханические гироскопы, а акселерометры знал только электронные. Теперь узнал, что бывают и такие, и используются очень широко, в основном в мобильной и автомобильной электронике.
На последнем фото также видно две микросхемы буферов CD4001 (это 2И-НЕ). Это для развязки контроллера и остальной схемы. Далее сигнал управления поступает на драйвера IR2184S, которые подают напряжения на затворы силовых полевиков, фото которых я давал выше.
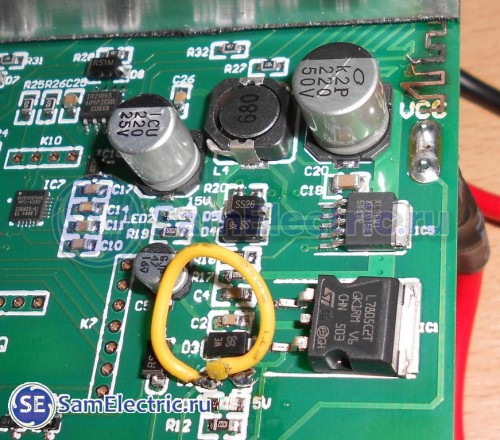
Схема питания сегвея
Блок питания XL7015 – преобразователь DC-DC, из плавающего постоянного напряжения около 48В он путем преобразований на частоте несколько килогерц выдает стабильное постоянное напряжение 15В. Далее – обычная КРЕНка 7805 выдает 5 Вольт. Желтая топорная перемычка была, я тут ни при чём. А вот сгоревшая дорожка вверху справа – это путь питания 0В на управление, её пришлось восстанавливать.
Слаботочные элементы схемы сигвея соединяются через кросс-плату:

На эту плату приходят сигналы: от потенциометра руля, от кнопок наличия человека, к светодиодам панели управления. И уходят провода на главную плату.
Вот двигателя с редукторами, на оси которых непосредственно насаживаются колёса. Добротно сделано, только никаких опознавательных знаков:

Двигатель колеса с редуктором
Аккумулятор тоже не содержит никаких надписей:

Входят два провода для зарядки (потоньше) и два выходных провода.
Видите искореженные места? Аккумулятор вообще никак не закреплен, болтается в сигвее, и бьётся об острые края ребер жесткости.
В общем, сделано на … короче, плохо сделано, и так или иначе скорая поломка сигвея была неизбежной.
Ещё примочка – преобразователь, также валялся на дне, замотан в плёнку. Поскольку светодиоды габаритных огней рассчитаны на напряжение 12 В, а аккумулятор – на 48 В, то используется преобразователь постоянного напряжения DC-DC 48-12 В:

Закончим с устройством электроники, теперь я приведу схему, на которой показано, как это всё соединено:
Схема сигвея
На схеме показаны все элементы, фотографии которых я привел выше. Замок “зажигания” содержит два контакта, обозначенных как S1 и S2. Предохранители как бы образуют один предохранитель на 100 Ампер, но они не сработали при жесточайшем КЗ.
Ремонт segway
Ремонт сибвея свелся к замене силовых транзисторов, их драйвера, и резисторов обвязки. Также восстановлена перегоревшая дорожка, замок с ключом заменен на обычные тумблеры, и в схему включен защитный автомат на 63 А. Надеюсь, в случае чего, он спасет схему от выгорания.
Только в этом случае опять пострадает и чей-то нос.
Так что прогноз пессимистичный, покупайте только качественные вещи, особенно, если речь идёт о безопасности! Теперь понятно, почему на всех фото ездок на сигвее с надетым шлемом…
Езда на Segway
Езда на подобном оригинальном внедорожном сигвее (в спокойном режиме) показана на видео:
Также в видео подробно рассказано про технические характеристики этого замечательного устройства.
Ардуино сигвей своими руками
 Как сделать
Как сделать
Гиропульт на Arduino

Покупаем все необходимое:

Если аккумулятор рабочий, можно припаяться к контактным площадкам, тогда аккумулятор будет подключаться через защитную микросхема. Но если напряжения на контактах нет – разбираем аккумулятор. Снимаем защитную пленку и пластиковые концы, вместе с платой.

Припаиваемся к местам, куда была подключена плата аккумулятора. Обычно корпус – это плюс, а маленький контакт в середине – минус. На всякий случай проверьте тестером или мультиметром, перед тем как припаивать провода.

Припаиваем два провода на плюс и два на минус. Одну пару выводим в колодку для зарядки аккумулятора. Минус от второй пары пока просто выводим наружу, плюс надо подключить через выключатель, а провод от выключателя, также, как и минус пока просто выводи в сторону. Главное не допускай короткого замыкания проводов аккумулятора!

Заматываем аккумулятор изолентой. Выключатель стоит приклеить с помощью термоклея. Корпус аккумулятора необходимо тщательно обмотать, чтобы не допустить случайный КЗ.

Отрезаем примерно 30 см от текстильной застежки или липучка. Разделяем на две части. Берем часть, которая мягкая и с ворсом. При помощи изоленты по краям аккумулятора приматываем его к части ленты. Посередине должен остаться участок, не замотанный изолентой, к нему будет прилепляться ответная часть от ленты. В ленте делаем небольшое отверстие, посередине и продеваем в него провод от аккумулятора.

Шаг 2 Подготовка электронной части пульта.
В качестве центрального контролера берем Arduino Pro Mini. Брать необходимо версию, работающую на частоте 8 МГц и от 3.3 V. Необходима именно эта версия по нескольким причинам. Во-первых, мы используем аккумулятор с напряжение 4.2 В, маловато для 5 В версии, а для повышающего напряжение модуля места нет. Во-вторых, радио модуль nRF24L01+ работает от 3.3 В, для его питания мы будем использовать стабилизатор напряжения Arduino, для отдельного стабилизатора напряжения, также, места нет. Ну и в-третьих, Arduino Pro Mini 3.3V 8MHz потребляет значительно меньше энергии, а вычислительной мощности для этого пульта достаточно. Припаиваем к Arduino провода Tx, Rx и GND и выводим к общую колодку для заливки скетчей. Также можно вывести и провод DTR для автоматической перезагрузки модуля при заливке скетча.

Теперь возьмем аккумулятор с ремешком. Поместим аккумулятор на ладонь, обернем ремешок вокруг руки, Arduino будет размещена на внешней стороне кисти руки. Отрезаем провод от аккумулятора, так чтобы он доставал до Arduino. На плате Arduino Pro Mini 3.3v стоит стабилизатор напряжения на 3.3v. Подключать плюсовой провод, идущий от кнопки выключения, мы будем к контакту RAW.
Берем в руки GY521. Этот маленький модуль позволяет определять положение и перемещение в пространстве. Используя его можно получить такие данные как углы крена, дифферента. Ориентироваться придется по вектору силы тяжести и скорости вращения. Также с помощью GY521 можно измерять температуру но мы это использовать не будем. В распоряжении модуля есть три оси перемещения. GY521 подключается по шине I2C. Припаиваем провода по следующей схеме

Расстояние между Arduino и GY521 должно быть пару миллиметров. Припаиваем провода согласно схеме.

Все провода можно зафиксировать при помощи термоклея, чтобы они не отвалились.
Переходим к радио модулю. Для этого пульта мы будем использовать nRF24L01+. Этот радио модуль работает на частоте 2.4 ГГц. На плате у него нет стабилизатора напряжения. А модуль работает от напряжения в 3.3 вольта. Поэтому работать он у нас будет от стабилизатора Arduino. У наиболее распространённых модулей размер платы 28,5 х 15,2 мм. Можно использовать такие модули, к ним легче припаивать провода, так как расстояние между контактами 2,54 мм.

Я рекомендую использовать nrf24l01 мини. У этой версии размер платы 18 х 12 мм. Пульт получается компактнее, и плата не выходит за пределы ленты. Единственный минус – расстояние между контактами 1,27 мм, паять проблематично.

Для начала припаиваем провода к нашему радио модулю.

Чтобы не отломать провода при зачистке и пайке к Arduino, замотайте место пайки изолентой.

Припаиваем провода к Arduino по следующей схеме:
Чтобы все было компактно, не оставляйте большой запас проводов. Припаиваем все провода. Собранные все вместе модули
Размещаем всю электрику на ленте или ремешке, так чтобы модуль акселерометра GY521 располагался на внешней стороне кисти руки.

Теперь берем ответную часть от текстильной ленты. И накрываем этой частью всю нашу электрику.

Так как между частями ленты – Arduino и прочие модули, липнуть друг к другу они не будут. Чтобы не вываливались «потроха» нашего пульта, обматываем ленту изолентой.

Колодка для заливки скетча, будет находиться между частями ленты, изоленту наматываем до этой колодки. Таким образом у нас будет доступ к колодке, разъединив ленты до изоленты.
Шаг 3 Подготовка и заливка скетча.
Сегодня, как и всегда, для редактирования и заливки скетча воспользуемся Arduino IDE. Это самый распространённый и удобный, на мой взгляд, редактор. Скачиваем с официального сайта.
После установки среды разработки, добавляем в нее библиотеки. Для удобства я добавил все необходимые библиотеки в один архив. Скачав его, распаковываем и переписываем библиотеки в папку «libraries», находящуюся в директории с установленной Arduino IDE
libraries.rar
Теперь можно скачать мой скетч:
ard_gy521_nrf24.rar
Приемник можно установить в любую модель или робота на Arduino. Я для примера поставил на Тобби. Инструкцию по его изготовлению можно найти здесь.
Там надо только заменить Bluetooth модуль на nRF24.
Пульт надевается на руку и при отклонении отправляет команды управления
МозгоЧины
#самоделки #инструкции #ремонт_техники #изобретения
МозгоЧины
#самоделки #инструкции #ремонт_техники #изобретения
Сегвей своими руками
Сегвей своими руками
Привет всем мозгочинам! В моем новом мозгопроекте я буду создавать своими руками самобалансирующееся транспортное средство или «Сегвей». Для данного проекта нужны базовые знания в электронике и умение работать вручную. Все механические компоненты можно приобрести в сети Интернет или в местном магазине.
СЕГВЕЙ состоит из платформы, на которой стоят в вертикальном положении, и двух боковых электродвигателей, приводимых в действие с помощью аккумуляторов. Алгоритм контроллера управления обеспечивает устойчивое положение. Перемещение сегвея контролируется водителем путем наклона его туловища, и ручкой для выбора направления движения влево/вправо. Поэтому вам понадобятся дополнительные компоненты, такие как контроллер, привод двигателя и датчик ускорения/гироскоп. Механическая конструкция изготовлена из дерева, поскольку оно имеет легкий вес, электрически изолировано и легко поддается обработке. Теперь приступим к изготовлению сегвея!
Шаг 1: Основные характеристики проекта
В настоящем проекте требуется изготовить устройство со следующими характеристиками:
— Достаточная мощность и устойчивость для езды по улице, и даже по гравийной дорожке;
— 1 час непрерывной работы
— Общая стоимость до 500€ евро
— Возможность беспроводного управления
— Запись данных на SD-карту для выявления поломок
Шаг 2: Проектирование системы
На прилагаемой диаграмме показана электрическая схема сегвея и привода двигателя. В качестве микроконтроллера Arduino можно выбрать Uno, Nano или ATmega 328 как отдельный чип. Аккумуляторы подключены последовательно, чтобы получить напряжение 24 В, необходимое для питания сдвоенной мостовой схемы управления для двигателей. Питание подается, пока водитель удерживает нажатой кнопку «ready». Для аварийного останова отпустите данную кнопку. При этом снимается питание с двигателей. Arduino использует последовательную связь в «пакетном» режиме на скорости 38 400 бод с мостовой схемой управления и беспроводным модулем XBee. Параметры наклона и управления измеряются с помощью датчика ускорения/гироскопа InvenSense MPU-6050 на модуле “GY-521”, располагаемого на 2 отдельных платах расширения. Связь с микроконтроллером Arduino происходит по шине I2C. Датчик наклона (адрес 0x68) запрограммирован на выполнение опроса каждые 20 мс и обеспечивает прерывание микроконтроллера Arduino. Второй датчик (адрес 0x69) «подтянут» к Arduino. Концевой выключатель нагрузки определяет, когда водитель становится на платформу, чтобы активировать алгоритм балансировки СЕГВЕЯ.
Шаг 3: Конструкция каркаса
Колеса и двигатели с зубчатой передачей прикрепляются винтами на трех деревянных деталях, собранных в U-образной форме. Ручка представляет собой деревянную палку, удерживаемую болтом в передней деревянной детали. Важно, чтобы распределение веса СЕГВЕЯ происходило равномерно при вертикальном положении, которое является положением проезда. Поэтому необходимо учесть тяжелые компоненты, такие как аккумуляторы. В противном случае алгоритм балансировки может быть затруднительным.
В нашем случае аккумуляторы располагаются в задней части деревянной коробки для компенсации веса двигателя, располагаемого в центре. В промежутке между ними располагаются остальные электронные компоненты.
К ручке изолентой прикреплена нажимная кнопка готовности движения “rider ready”.
Шаг 4: Электрическая схема
Проводка в деревянной коробке расположена в соответствии со схемой. Подключите выводы микроконтроллера Arduino к датчикам, мостовой схеме управления и двигателям в соответствии с представленной таблицей.
Датчик наклона установлен горизонтально вдоль оси х, а датчик управления вертикально вдоль оси у.
Шаг 5: Тестирование и настройка
Примите во внимание, что двигатели должны иметь достаточную мощность. Проверьте устройство в широкой и безопасной зоне, чтобы избежать получения травм или повреждений. Рекомендуется надевать защитные щитки и шлем.
Выполните пошаговую процедуру. Начните с программирования микроконтроллера Arduino (загрузите исходный код), далее проверьте связь с датчиками и мостовой схемой управления.
Arduino Terminal может использоваться для отладки программного кода и проверки работоспособности. Например, нужно настроить усиление ПИД-регулятора, поскольку оно зависит от механических и электрических параметров двигателя.
Усиление настраивается по данной процедуре:
1. Параметр Kp предназначен для балансировки. Увеличивайте Kp, пока балансировка станет нестабильной, Ki и Kp остаются 0. Незначительно снизьте Kp для получения устойчивого состояния.
2. Параметр Ki предназначен для ускорения/снижения ускорения при наклоне. Увеличьте Ki для получения правильного ускорения, чтобы избежать падения при наклоне вперед, Kp остается 0. Теперь балансировка должна стать стабильной.
3. Параметр Kd используется для компенсации включения и возврата к устойчивому положению.
После подачи питания на Arduino выполняется инициализация датчиков и переход в состояние ожидания. При нажатии нажимной кнопки происходит передача управляющего сигнала в контроллер СЕГВЕЯ, находящегося в вертикальном положении, который готов для активации двигателей для перемещения вперед или назад в зависимости от первоначального положения. С этого момента кнопку нужно держать нажатой постоянно, в противном случае двигатели выключатся, и контроллер перейдет в состояние ожидания. После достижения вертикального положения, контроллер ожидает сигнал концевого выключателя нагрузки “Водитель на месте”, который обычно нажимают ногой, когда водитель находится на платформе. После этого запускается алгоритм балансировки и происходит активация двигателей вперед или назад для того, чтобы остаться в вертикальном положении. Наклон вперед создает поступательное движение вперед и наоборот. Нахождение в наклоненном положении приводит к ускорению движения. Наклон в противоположном направлении приводит к снижению скорости. Для перемещения влево и вправо используйте ручку.
Шаг 6: Демо
Смотрите ниже видео готового устройства и спасибо за внимание!
Источники:
https://avtopraim.ru/velosiped/kak-sdelat-velosiped-iz-giroskutera.html
https://stroynietela.ru/kak-sdelat-sigvey-doma/
https://stroynietela.ru/kak-sdelat-samodelnyy-sigvey/
https://netigor.ru/arduino-sigvey-svoimi-rukami/