Как самому сделать сигвей
 Как сделать
Как сделать
Как сделать сегвей своими руками
Неужели такое сложное устройство, как сигвей, можно сделать самому? Оказывается, можно. Если приложить достаточно усердия и воспользоваться специальными знаниями. Что и сделал молодой инженер по имени Petter Forsberg, окончивший шведский технологический университет Чалмерса по специальности «Автоматизация и мехатроника».
Оборудование (200 €)*
* Цены указаны приблизительно
Электроника (100 €)*
Механика
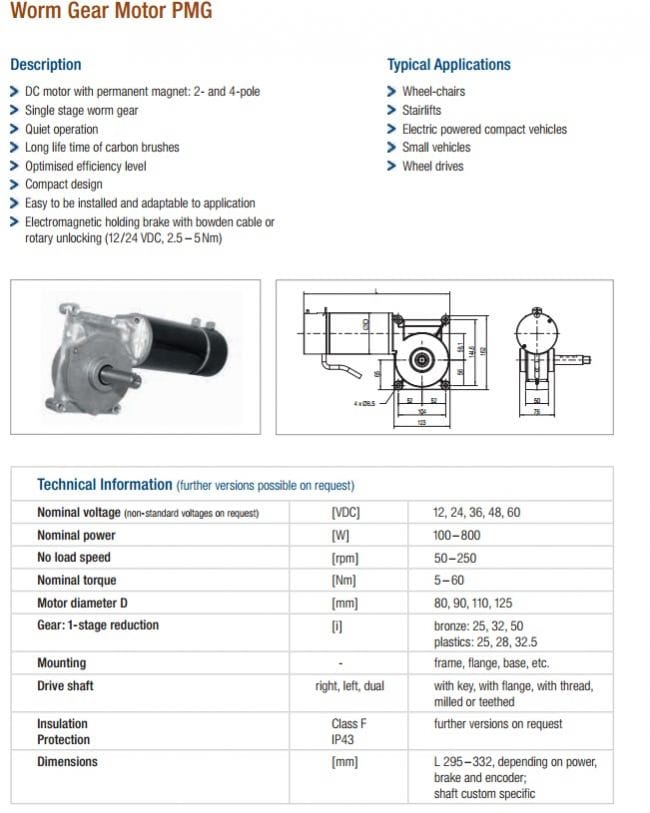
Двигатели, колеса, цепи, шестерни и аккумуляторы были взяты от двух недорогих китайских электроскутеров. Двигатели позволяют обеспечить 24Вольт, 300Вт, 2750 оборотов в минуту.
Передача осуществляется от малой шестерни на моторе к большой шестерне на руле. Соотношение составляет примерно 6:1, такое высокое соотношение предпочтительнее, чтобы получить лучший крутящий момент и пониженную максимальную скорость. Передача на 12-дюймовом колесе была основана на механизме свободного хода, поэтому пришлось внести необходимые изменения, чтобы можно было водить колесо в обоих направлениях.
Чтобы иметь возможность поворачивать при управлении сегвеем с помощью наклона рулевой колонки влево и вправо был выполнен чертеж необходимой детали в программе SolidWorks, после чего она была изготовлена на станке с ЧПУ. Программа для станка была написана с применением CAMBAM. Этот же метод был использован для производства коробки для электроники и сборки блока экстренного торможения.
Руль будущего сегвея представляет из себя обычный велосипедный руль, трубка которого присоединена к 25 мм стальной полой трубе. Чтобы сохранять положение рулевой колонки по центру и создать некоторое усилие для обратной связи были задействованы две стальные пружины. На руле также предусмотрена аварийная кнопка, которая подключена к стандартному реле от автомобиля и может снизить мощность двигателя.
Для питания используются два свинцовых аккумулятора 12V 12Ah, которые применяются для моторов на 24V.
Электроника
Все печатные платы были изготовлены специально для этой разработки. Главная плата берет на себя вычисления, собирает данные от датчиков, таких как гироскоп (ADXRS614), акселерометр (ADXL203) и подстроечный потенциометр, на основании чего способна определить в каком направлении вы хотите повернуть.
Основной процессор AVR ATmega168. Соединение с ноутбуком производится по Bluetooth с использованием RN-41. Два H-моста преобразуют сигналы управления от основной платы на усилие для двигателей. Каждый H-мост имеет ATmega168, связь между платами осуществляется через UART. Вся электроника работает на отдельной батарее (LiPo 7.4V 900mAh).
Чтобы иметь простой доступ к зарядке аккумуляторов, для программирования основной платы, изменения параметров контура управления была сделана небольшая коробка с необходимыми разъемами, переключателем питания электроники и подстроечного потенциометра на верхней стороне.
Программное обеспечение
Программное обеспечение микроконтроллера в основном состоит из фильтра для гироскопа и акселерометра и цикла PD управления. Для теста были взяты два фильтра: Kalman и Complemenatry. Оказалось, что производительность их была очень похожа, но для Complemenatry фильтра требуется меньше вычислений, поэтому именно он был выбран для использования. Также были написаны приложения на Java, чтобы можно было видеть все значения датчиков и сигналов управления, состояния батареи и т.д.
Техническая сторона создания сегвея своими руками на этом видео:
Как изготовить своими руками сегвей
В этом видео уроке показано, как изготовить самодельный сигвей, как оказалось, его можно сделать своими руками. Это предварительная модель, которая делается без гироскопа и Ардуино, поэтому необходимо ее доработать, что автор и собирается сделать на одном из этапов. Еще очень интересная модель электросамоката тут.
Сегвей своими руками

Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.

Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Segway: описание конструкции и самостоятельное производство

В век технического прогресса и повального совершенствования, затрагивающего все сферы и отрасли деятельности, современного человека продолжают волновать вопросы, касающиеся модернизации всего, что нас окружает. Одни стараются изо всех сил сделать мир комфортнее, действуя бескорыстно, другие в это время движимы коммерческой выгодой, но в результате вместе они работают на внедрение чего-либо нового и полезного в реальность. Одним из недавних технических изобретений стал Segway, изобретенный Дином Кейменом. Для многих людей segway является новым. Примечательно, что данное изобретение было изобретено всего несколько лет назад, и пока только набирает широкое распространение по всему свету, а поэтому внимание к нему популяризируется с каждым днём.
Segway: определение, интересные факты, описание конструкции и принципа работы Segway
![]()
Примечательно, что каждое колесо вращается посредством работы индивидуального двигателя. Во время наклона корпуса водителя вперед устройство начинает направляться вперед, и по мере увеличения угла наклона корпуса человека скорость увеличивается. Процесс торможения производится в обратном порядке, когда корпус отклоняется в вертикальную позицию. На самом деле управление можно освоить достаточно быстро. Управлять segway можно с помощью поворотной рукоятки, однако новые модели для реализации этого процесса позволяют владельцу только качнуть колонку в стороны.
Гироскутер способен развивать скорость до 20 километров в час. Аккумуляторная батарея позволяет автоматическому самокату двигаться на несколько десятков километров без необходимости зарядки. Максимальный предел нагрузки сигвея составляет порядка 140 килограмм. В современных США сегвей используется активным образом работниками почты, игроками в гольф и другими спортсменами и служащими. Вдобавок ко всему сигвей служит отличным развлечением в городских парках, добавляя массу позитивных эмоций от катания на свежем воздухе.
Несмотря на то, что гироскутер является достаточно дорогостоящим аппаратом, получить его в собственное владение и впоследствии получать наслаждение от езды на подобном автоматическом самокате вполне возможно с минимальными финансовыми вложениями. Ниже постараемся разобраться, как сделать сигвей своими руками, при этом, не потратив много средств. Однако стоит знать, что на некоторые финансовые растраты все же придется пойти.
Как сделать сигвей своими руками?
Для удобства понимания процесса сборки сигвея самостоятельно ниже предлагаются несколько этапов последовательности действий по каждому из них. Но для начала стоит обзавестись некоторыми инструментами и материалами, общая стоимость которых обойдется в несколько сотен евро.
Оборудование, материалы, электроника:
Выше предложен перечень всех компонентов, материалов, инструментов, необходимых для создания увлекающего внимание двухколесного транспортного средства. Сегвей окажется отличным решением и средством для времяпрепровождения людьми с нестандартными интересами. Разумеется, в зависимости от региона проживания набор оборудования, расходных материалов и электроники может стоить по-разному, но средняя цена всего этого выльется в 350$. Для сравнения стоит сказать, что стоимость настоящего нового сигвея обойдется Вам гораздо дороже, поскольку автоматический производственный самокат стоит несколько тысяч долларов. Так что, есть, за что стараться работать над полезным приспособлением.
Segway: механическая составляющая, электроника и ПО
Для удобного понимания процесса изготовления сигвея собственноручно, как уже было сказано, ниже предлагаются этапы алгоритмов действий. Сначала следует механика, как основа всей конструкции.
Последовательность работы по созданию механики:
С механической стороной нашего устройства можно разобраться, потратив некоторое время. Еще для того, чтобы сделать сигвей, понадобится уделить внимание оснащению транспорта электроникой. Электроника — важная составляющая каждого сигвея, а поэтому отнеситесь к работе ответственно и внимательно!
Последовательность оснащения электроникой:
Если Ваши отношения с электроникой и механикой достаточно сложны, понадобится набраться терпения и постараться разобраться в устройстве и построении рассматриваемой конструкции. В конце трудов Вы обязательно получите моральное удовлетворение от проделанной работы, получите возможность насладиться поездкой на сигвее. Теперь стоит приблизиться к наделению сигвея программным обеспечением.
Последовательность работы с наделением устройства программным обеспечением:
Механика, электроника, ПО – все эти шаги требуют от домашнего мастера некоторой сноровки и понимания тематики. При сильном желании сделать segway своими руками в домашних условиях, можно позвать на помощь интересующихся друзей: вместе Вы получите больше шансов на получение предмета ожидаемого результата.
Как самому сделать сигвей
 Как сделать
Как сделать
Как сделать сегвей своими руками
Неужели такое сложное устройство, как сигвей, можно сделать самому? Оказывается, можно. Если приложить достаточно усердия и воспользоваться специальными знаниями. Что и сделал молодой инженер по имени Petter Forsberg, окончивший шведский технологический университет Чалмерса по специальности «Автоматизация и мехатроника».
Оборудование (200 €)*
* Цены указаны приблизительно
Электроника (100 €)*
Механика
Двигатели, колеса, цепи, шестерни и аккумуляторы были взяты от двух недорогих китайских электроскутеров. Двигатели позволяют обеспечить 24Вольт, 300Вт, 2750 оборотов в минуту.
Передача осуществляется от малой шестерни на моторе к большой шестерне на руле. Соотношение составляет примерно 6:1, такое высокое соотношение предпочтительнее, чтобы получить лучший крутящий момент и пониженную максимальную скорость. Передача на 12-дюймовом колесе была основана на механизме свободного хода, поэтому пришлось внести необходимые изменения, чтобы можно было водить колесо в обоих направлениях.
Чтобы иметь возможность поворачивать при управлении сегвеем с помощью наклона рулевой колонки влево и вправо был выполнен чертеж необходимой детали в программе SolidWorks, после чего она была изготовлена на станке с ЧПУ. Программа для станка была написана с применением CAMBAM. Этот же метод был использован для производства коробки для электроники и сборки блока экстренного торможения.
Руль будущего сегвея представляет из себя обычный велосипедный руль, трубка которого присоединена к 25 мм стальной полой трубе. Чтобы сохранять положение рулевой колонки по центру и создать некоторое усилие для обратной связи были задействованы две стальные пружины. На руле также предусмотрена аварийная кнопка, которая подключена к стандартному реле от автомобиля и может снизить мощность двигателя.
Для питания используются два свинцовых аккумулятора 12V 12Ah, которые применяются для моторов на 24V.
Электроника
Все печатные платы были изготовлены специально для этой разработки. Главная плата берет на себя вычисления, собирает данные от датчиков, таких как гироскоп (ADXRS614), акселерометр (ADXL203) и подстроечный потенциометр, на основании чего способна определить в каком направлении вы хотите повернуть.
Основной процессор AVR ATmega168. Соединение с ноутбуком производится по Bluetooth с использованием RN-41. Два H-моста преобразуют сигналы управления от основной платы на усилие для двигателей. Каждый H-мост имеет ATmega168, связь между платами осуществляется через UART. Вся электроника работает на отдельной батарее (LiPo 7.4V 900mAh).
Чтобы иметь простой доступ к зарядке аккумуляторов, для программирования основной платы, изменения параметров контура управления была сделана небольшая коробка с необходимыми разъемами, переключателем питания электроники и подстроечного потенциометра на верхней стороне.
Программное обеспечение
Программное обеспечение микроконтроллера в основном состоит из фильтра для гироскопа и акселерометра и цикла PD управления. Для теста были взяты два фильтра: Kalman и Complemenatry. Оказалось, что производительность их была очень похожа, но для Complemenatry фильтра требуется меньше вычислений, поэтому именно он был выбран для использования. Также были написаны приложения на Java, чтобы можно было видеть все значения датчиков и сигналов управления, состояния батареи и т.д.
Техническая сторона создания сегвея своими руками на этом видео:
Как изготовить своими руками сегвей
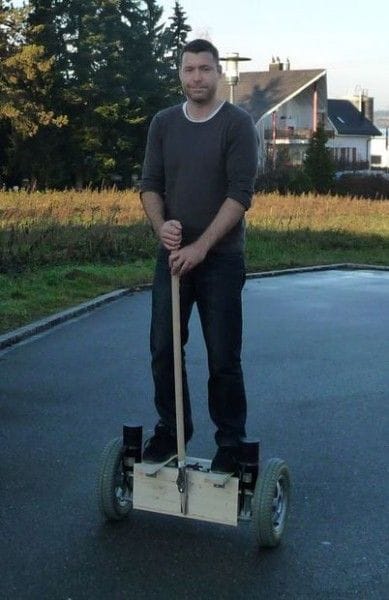
В этом видео уроке показано, как изготовить самодельный сигвей, как оказалось, его можно сделать своими руками. Это предварительная модель, которая делается без гироскопа и Ардуино, поэтому необходимо ее доработать, что автор и собирается сделать на одном из этапов. Еще очень интересная модель электросамоката тут.
Сегвей своими руками
Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.
Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Segway: описание конструкции и самостоятельное производство
В век технического прогресса и повального совершенствования, затрагивающего все сферы и отрасли деятельности, современного человека продолжают волновать вопросы, касающиеся модернизации всего, что нас окружает. Одни стараются изо всех сил сделать мир комфортнее, действуя бескорыстно, другие в это время движимы коммерческой выгодой, но в результате вместе они работают на внедрение чего-либо нового и полезного в реальность. Одним из недавних технических изобретений стал Segway, изобретенный Дином Кейменом. Для многих людей segway является новым. Примечательно, что данное изобретение было изобретено всего несколько лет назад, и пока только набирает широкое распространение по всему свету, а поэтому внимание к нему популяризируется с каждым днём.
Segway: определение, интересные факты, описание конструкции и принципа работы Segway
![]()
Примечательно, что каждое колесо вращается посредством работы индивидуального двигателя. Во время наклона корпуса водителя вперед устройство начинает направляться вперед, и по мере увеличения угла наклона корпуса человека скорость увеличивается. Процесс торможения производится в обратном порядке, когда корпус отклоняется в вертикальную позицию. На самом деле управление можно освоить достаточно быстро. Управлять segway можно с помощью поворотной рукоятки, однако новые модели для реализации этого процесса позволяют владельцу только качнуть колонку в стороны.
Гироскутер способен развивать скорость до 20 километров в час. Аккумуляторная батарея позволяет автоматическому самокату двигаться на несколько десятков километров без необходимости зарядки. Максимальный предел нагрузки сигвея составляет порядка 140 килограмм. В современных США сегвей используется активным образом работниками почты, игроками в гольф и другими спортсменами и служащими. Вдобавок ко всему сигвей служит отличным развлечением в городских парках, добавляя массу позитивных эмоций от катания на свежем воздухе.
Несмотря на то, что гироскутер является достаточно дорогостоящим аппаратом, получить его в собственное владение и впоследствии получать наслаждение от езды на подобном автоматическом самокате вполне возможно с минимальными финансовыми вложениями. Ниже постараемся разобраться, как сделать сигвей своими руками, при этом, не потратив много средств. Однако стоит знать, что на некоторые финансовые растраты все же придется пойти.
Как сделать сигвей своими руками?
Для удобства понимания процесса сборки сигвея самостоятельно ниже предлагаются несколько этапов последовательности действий по каждому из них. Но для начала стоит обзавестись некоторыми инструментами и материалами, общая стоимость которых обойдется в несколько сотен евро.
Оборудование, материалы, электроника:
Выше предложен перечень всех компонентов, материалов, инструментов, необходимых для создания увлекающего внимание двухколесного транспортного средства. Сегвей окажется отличным решением и средством для времяпрепровождения людьми с нестандартными интересами. Разумеется, в зависимости от региона проживания набор оборудования, расходных материалов и электроники может стоить по-разному, но средняя цена всего этого выльется в 350$. Для сравнения стоит сказать, что стоимость настоящего нового сигвея обойдется Вам гораздо дороже, поскольку автоматический производственный самокат стоит несколько тысяч долларов. Так что, есть, за что стараться работать над полезным приспособлением.
Segway: механическая составляющая, электроника и ПО
Для удобного понимания процесса изготовления сигвея собственноручно, как уже было сказано, ниже предлагаются этапы алгоритмов действий. Сначала следует механика, как основа всей конструкции.
Последовательность работы по созданию механики:
С механической стороной нашего устройства можно разобраться, потратив некоторое время. Еще для того, чтобы сделать сигвей, понадобится уделить внимание оснащению транспорта электроникой. Электроника — важная составляющая каждого сигвея, а поэтому отнеситесь к работе ответственно и внимательно!
Последовательность оснащения электроникой:
Если Ваши отношения с электроникой и механикой достаточно сложны, понадобится набраться терпения и постараться разобраться в устройстве и построении рассматриваемой конструкции. В конце трудов Вы обязательно получите моральное удовлетворение от проделанной работы, получите возможность насладиться поездкой на сигвее. Теперь стоит приблизиться к наделению сигвея программным обеспечением.
Последовательность работы с наделением устройства программным обеспечением:
Механика, электроника, ПО – все эти шаги требуют от домашнего мастера некоторой сноровки и понимания тематики. При сильном желании сделать segway своими руками в домашних условиях, можно позвать на помощь интересующихся друзей: вместе Вы получите больше шансов на получение предмета ожидаемого результата.
Как сделать сигвей дома
 Как сделать
Как сделать
Segway: описание конструкции и самостоятельное производство
В век технического прогресса и повального совершенствования, затрагивающего все сферы и отрасли деятельности, современного человека продолжают волновать вопросы, касающиеся модернизации всего, что нас окружает. Одни стараются изо всех сил сделать мир комфортнее, действуя бескорыстно, другие в это время движимы коммерческой выгодой, но в результате вместе они работают на внедрение чего-либо нового и полезного в реальность. Одним из недавних технических изобретений стал Segway, изобретенный Дином Кейменом. Для многих людей segway является новым. Примечательно, что данное изобретение было изобретено всего несколько лет назад, и пока только набирает широкое распространение по всему свету, а поэтому внимание к нему популяризируется с каждым днём.
Segway: определение, интересные факты, описание конструкции и принципа работы Segway
![]()
Примечательно, что каждое колесо вращается посредством работы индивидуального двигателя. Во время наклона корпуса водителя вперед устройство начинает направляться вперед, и по мере увеличения угла наклона корпуса человека скорость увеличивается. Процесс торможения производится в обратном порядке, когда корпус отклоняется в вертикальную позицию. На самом деле управление можно освоить достаточно быстро. Управлять segway можно с помощью поворотной рукоятки, однако новые модели для реализации этого процесса позволяют владельцу только качнуть колонку в стороны.
Гироскутер способен развивать скорость до 20 километров в час. Аккумуляторная батарея позволяет автоматическому самокату двигаться на несколько десятков километров без необходимости зарядки. Максимальный предел нагрузки сигвея составляет порядка 140 килограмм. В современных США сегвей используется активным образом работниками почты, игроками в гольф и другими спортсменами и служащими. Вдобавок ко всему сигвей служит отличным развлечением в городских парках, добавляя массу позитивных эмоций от катания на свежем воздухе.
Несмотря на то, что гироскутер является достаточно дорогостоящим аппаратом, получить его в собственное владение и впоследствии получать наслаждение от езды на подобном автоматическом самокате вполне возможно с минимальными финансовыми вложениями. Ниже постараемся разобраться, как сделать сигвей своими руками, при этом, не потратив много средств. Однако стоит знать, что на некоторые финансовые растраты все же придется пойти.
Как сделать сигвей своими руками?
Для удобства понимания процесса сборки сигвея самостоятельно ниже предлагаются несколько этапов последовательности действий по каждому из них. Но для начала стоит обзавестись некоторыми инструментами и материалами, общая стоимость которых обойдется в несколько сотен евро.
Оборудование, материалы, электроника:
Выше предложен перечень всех компонентов, материалов, инструментов, необходимых для создания увлекающего внимание двухколесного транспортного средства. Сегвей окажется отличным решением и средством для времяпрепровождения людьми с нестандартными интересами. Разумеется, в зависимости от региона проживания набор оборудования, расходных материалов и электроники может стоить по-разному, но средняя цена всего этого выльется в 350$. Для сравнения стоит сказать, что стоимость настоящего нового сигвея обойдется Вам гораздо дороже, поскольку автоматический производственный самокат стоит несколько тысяч долларов. Так что, есть, за что стараться работать над полезным приспособлением.
Segway: механическая составляющая, электроника и ПО
Для удобного понимания процесса изготовления сигвея собственноручно, как уже было сказано, ниже предлагаются этапы алгоритмов действий. Сначала следует механика, как основа всей конструкции.
Последовательность работы по созданию механики:
С механической стороной нашего устройства можно разобраться, потратив некоторое время. Еще для того, чтобы сделать сигвей, понадобится уделить внимание оснащению транспорта электроникой. Электроника — важная составляющая каждого сигвея, а поэтому отнеситесь к работе ответственно и внимательно!
Последовательность оснащения электроникой:
Если Ваши отношения с электроникой и механикой достаточно сложны, понадобится набраться терпения и постараться разобраться в устройстве и построении рассматриваемой конструкции. В конце трудов Вы обязательно получите моральное удовлетворение от проделанной работы, получите возможность насладиться поездкой на сигвее. Теперь стоит приблизиться к наделению сигвея программным обеспечением.
Последовательность работы с наделением устройства программным обеспечением:
Механика, электроника, ПО – все эти шаги требуют от домашнего мастера некоторой сноровки и понимания тематики. При сильном желании сделать segway своими руками в домашних условиях, можно позвать на помощь интересующихся друзей: вместе Вы получите больше шансов на получение предмета ожидаемого результата.

Видео. Как делают Segway (Гироскутер)
Segway (гироскутер) своими руками
В этой статье будет рассмотрено создание самобалансирующегося средства передвижения или просто «Сегвей». Практически все материалы для создания данного устройства легкодоступны.
Само устройство представляет из себя платформу на которой стоит водитель. Путем наклона туловища осуществляется управление двумя электрическими двигателями посредством цепи схем и микроконтроллеров, отвечающих за балансировку.

-Беспроводной модуль управления XBee.
-микроконтроллер Arduino
-аккумуляторы
-датчик InvenSense MPU-6050 на модуле “GY-521”,
-деревянные бруски
-кнопка
-два колеса
и прочее, указанное в статье и на фотографиях.
Шаг первый: Определение требуемых характеристик и проектирование системы.
При создании этого устройства автор старался, чтобы оно укладывалась в такие параметры как:
-проходимость и мощность, необходимая для свободного перемещения даже по гравию
-аккумуляторы достаточной емкостью, чтобы обеспечить как минимум один час беспрерывной работы устройства
-обеспечить возможность беспроводного управления, а так же фиксирование данных о работе устройства на SD-карту для выявления и устранения неисправностей.
Кроме того желательно, чтобы затраты на создание подобного устройства были меньше чем заказ оригинального внедорожного гироскутера.
Согласно приведенной ниже диаграмме, вы можете увидеть схему электрической цепи самобалансирующегося транспортного средства.
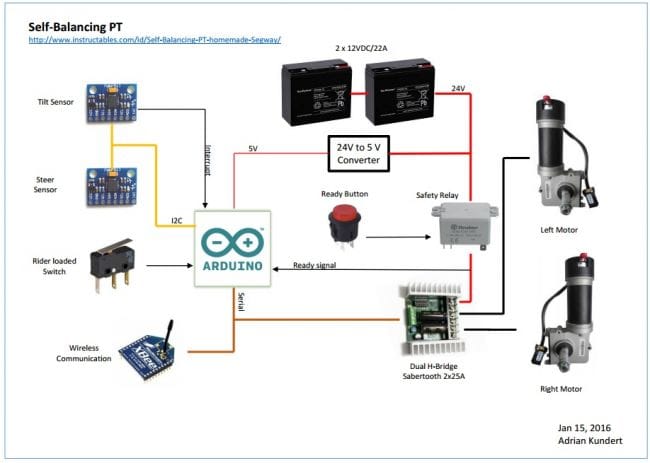
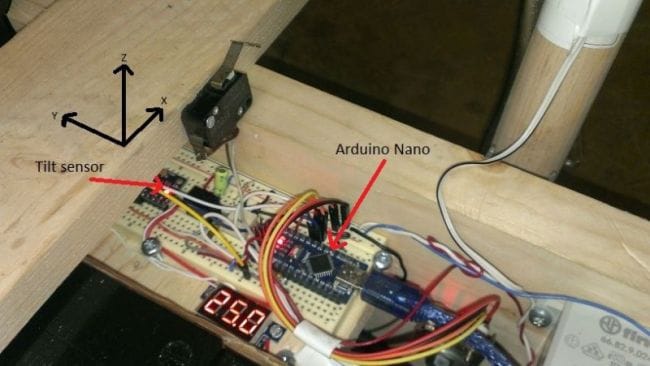
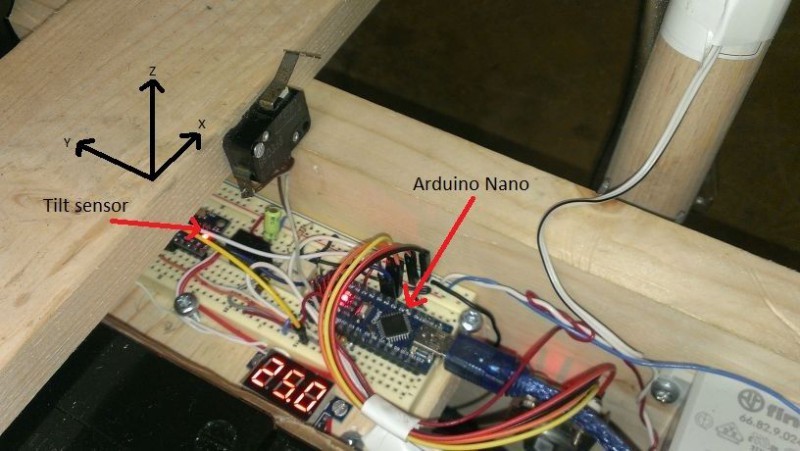
Выбор микроконтроллера для управления системами Сегвея разнообразен, автор система Arduino наиболее предпочтительна из-за своих ценовых категорий. Подойдут такие контроллеры как Arduino Uno, Arduino Nano или можно взять ATmega 328 для использования в качестве отдельного чипа.
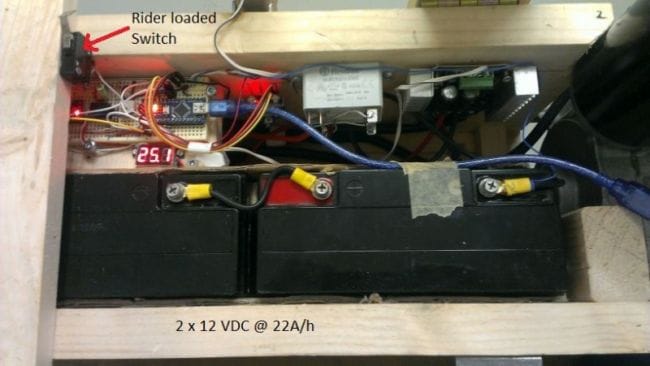
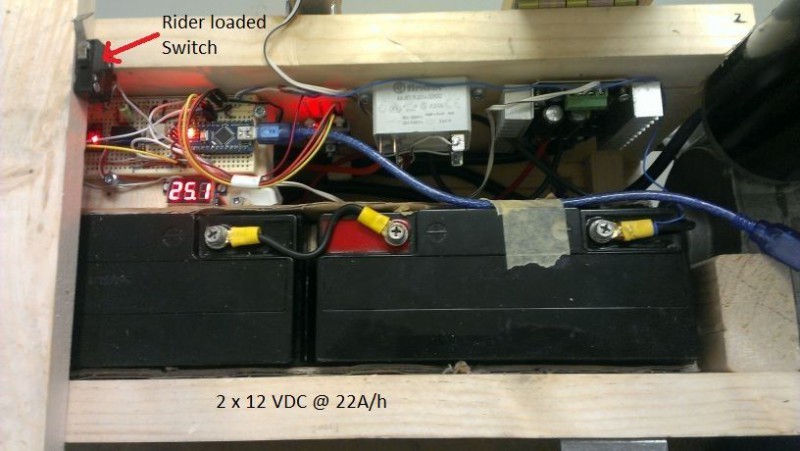
Чтобы запитать сдвоенную мостовую схему управления двигателей необходимо напряжение питания в 24 В, этого напряжения легко достигнуть путем последовательного подключения 12 В автомобильных аккумуляторов.
Система построена так, что питание на двигатели подается, только пока нажата кнопка старта, поэтому для быстрой остановки достаточно просто ее отпустить. При этом платформа Arduino должна поддерживать последовательную связь, как с мостовой схемой управления двигателей, так и с беспроводным модулем управления.
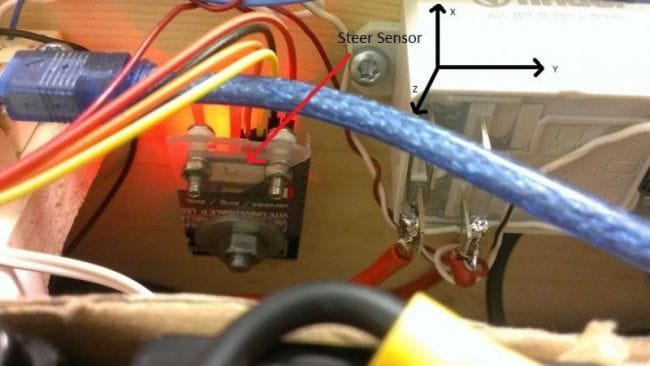
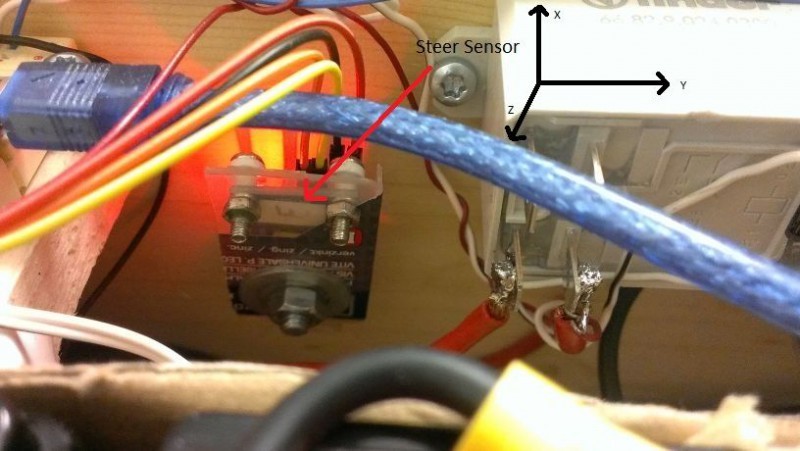
За счет датчика InvenSense MPU-6050 на модуле “GY-521”, обрабатывающего ускорение и несущего в себе функции гироскопа, измеряются параметры наклона. Датчик был расположен на двух отдельных платах расширения. По шине l2c поддерживается связь с микроконтроллером Arduino. Причем датчик наклона с адресом 0x68 был запрограммирован таким образом, чтобы выполнять опрос каждый 20 мс и обеспечивать прерывание микроконтроллера Arduino. Другой датчик имеет адрес 0x69 и он подтянут прямо к Arduino.
Когда пользователь встает на платформу скутера, срабатывает концевой выключатель нагрузки, который и активирует режим алгоритма для балансировки Сегвея.
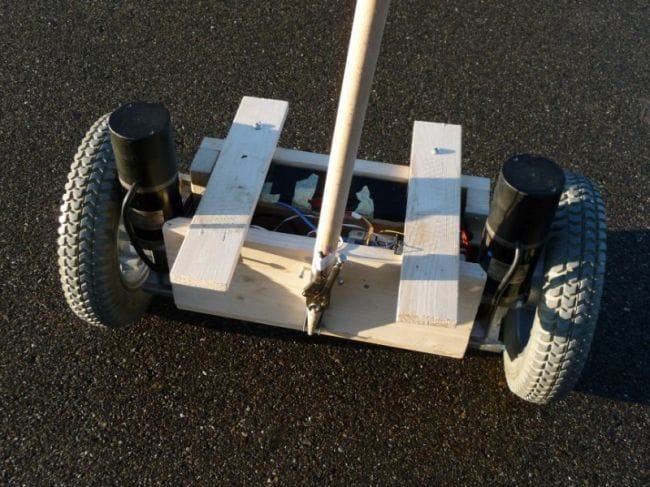
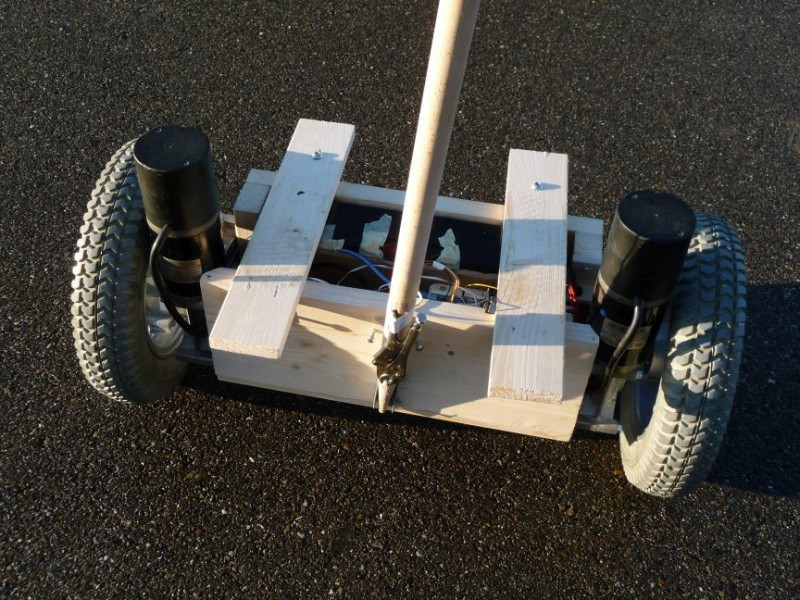
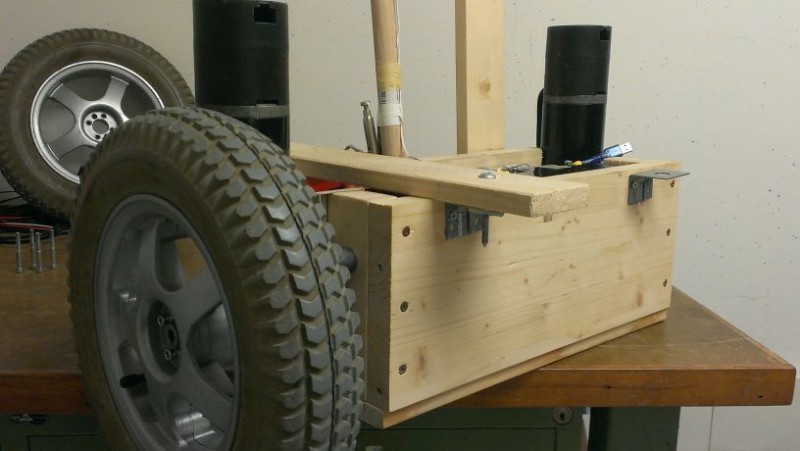
Шаг второй: Создание корпуса гироскутера и установка основных элементов.



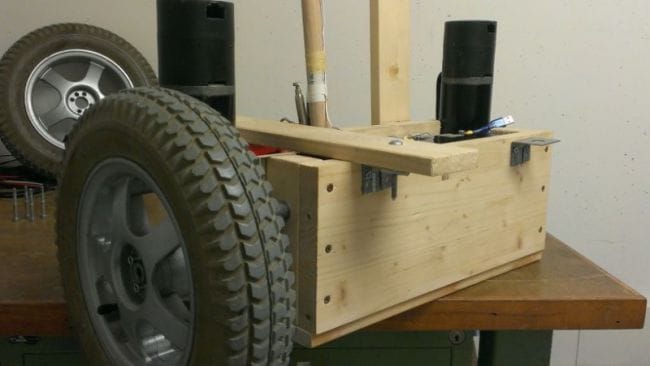


После определения основной концепции схемы работы гироскутера, автор приступил к непосредственной сборке его корпуса и установке основных деталей. В качестве основного материала послужили деревянные доски и бруски. Дерево мало весит, что положительно отразится на длительности заряда аккумуляторов, кроме того древесина легко обрабатывается и является изолятором. Из этих досок был сделан короб, в который будут устанавливаться аккумуляторы, двигатели и микросхемы. Таким образом, получилась U-образная деревянная деталь, на которую за счет болтов крепятся колеса и двигатели.
Передача мощности двигателей на колеса будет идти за счет зубчатой передачи. Во время укладки основных компонентов в корпус Сегвея очень важно проследить, чтобы вес распределялся равномерно при приведении Сегвея в рабочее вертикальное положение. Поэтому если не учесть распределение веса от тяжелых аккумуляторов, то работа балансировки устройства будет затруднена.
В данном случае автор расположил аккумуляторы сзади, так, что компенсировать вес двигателя, который находится в центре корпуса устройства. Электронные составляющие устройства были уложены в место между двигателем и аккумуляторами. Для последующего тестирования так же была прикреплена временная кнопка старта на ручке Сегвея.
Шаг третий: Электрическая схема.

Шаг четвертый: Тестирование и настройка устройства.
После проведения предыдущих этапов, автор получил модель Сегвея для тестирования.
При проведении тестирования важно принять во внимание такие факторы как безопасность зоны тестирования, а так же защитная экипировка в виде защитных щитков и шлема для водителя.
Начать тестирование Сегвея автор решил с загрузки кода на микроконтроллер и проверки его связи со схемами управления и датчиками.
После проведения настройки регулятора на контроллер подается питание, и датчики переходят в состояние ожидания. Затем нажимается кнопка старта, и включаются двигатели. Путем наклона Сегвея водитель управляет движением за счет работы алгоритма балансировки.
На видео ниже показана работа собранного устройства гироскутера:
Как сделать гироскутер своими руками в домашних условиях?
Что такое гироскутер?
Эти датчики считывают любое изменение положения относительно земной поверхности или точки от которой идет гравитационное воздействие. После считывания, информация подается на вспомогательные платы, которые находятся по обе стороны платформы. Так как датчики и сами электродвигатели работают независимо друг от друга, то в дальнейшем нам понадобятся два электродвигателя. От вспомогательных плат, информация в обработанном виде уже идет в материнскую плату с микропроцессором. Там уже с необходимой точностью выполняется программа удержания баланса.
То есть если платформа наклоняется вперед, примерно на несколько градусов, то двигателям подается сигнал на движение в обратное направление и платформа выравнивается. Также выполняется и наклон в другую сторону. Если же гироскутер наклоняется на больший градус, то программа сразу же понимает, что идет команда о движении вперед или назад электродвигателям. Если гироскутер наклоняется больше чем на 45 градусов, то двигатели и сам гироскутер отключается.
Гироскутер состоит, из корпуса, стальной или металлической основы, на который и будет крепится вся электроника. Дальше идет два электродвигателя с той мощностью, чтобы была возможность ездить под весом человека до 80-90кг. Дальше идет материнская плата с процессором и две вспомогательные платы, на которых как раз и стоят гироскопические датчики. И конечно же аккумулятор и два колеса с одинаковым диаметром. Как сделать гироскутер? Для решения этого вопроса, нам понадобится добыть определенные детали конструкции самого гироборда.

Двигатели с колесами
Что же нам понадобится?
Как сделать гироскутер своими руками? Первое и основное что понадобится, это два электрических двигателя, с мощностью способных перевозить вес взрослого человека. Средняя мощность у заводских моделей составляет 350 Ватт, поэтому постараемся найти двигатели такой мощности.
Дальше конечно же нужно найти два одинаковых колеса, примерно 10-12 дюймов. Лучше побольше, так как электроники у нас будет много. Чтобы проходимость была выше и расстояние между платформой и землей было на нужном уровне.
Два аккумулятора, свинцово-кислотных, нужно выбрать номинальную мощность как минимум 4400 мА/ч, а лучше больше. Так как мы будем делать не металлическую конструкцию, но она будет весить больше чем оригинальный мини-сигвей или гироскутер.
Производство и процесс
Как сделать гироскутер, мощный и чтобы он сам держал баланс при езде? Сначала нужно построить план, какое именно средство передвижения нам понадобится. Нам нужно сделать довольно мощное средство передвижения с большими колесами и большой проходимостью по разным дорогам. Минимальное значение беспрерывной езды должно составлять 1-1.5 часа. Мы потратим примерно около 500 евро. Поставим беспроводную систему управления нашему гироскутеру. Поставим считывающее устройство неполадок и ошибок, вся информация будет идти на SD-карту.
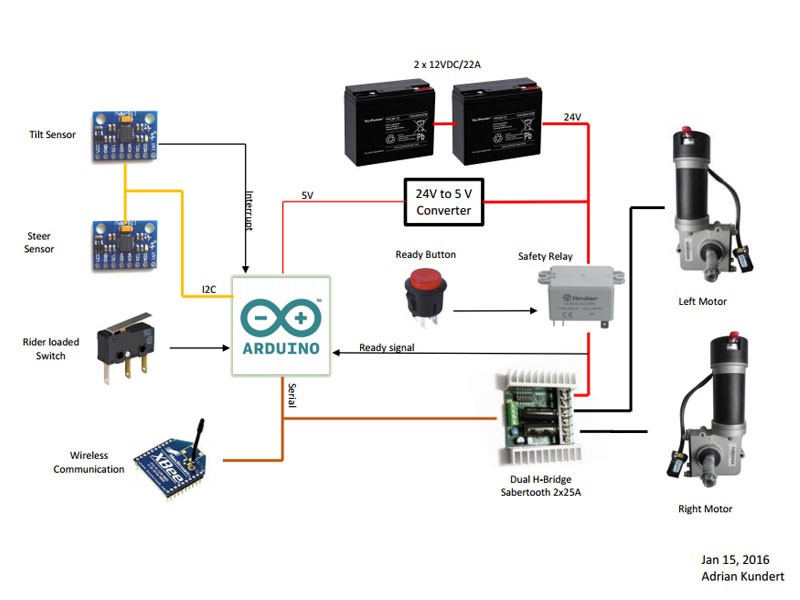
На схеме выше можно все четко увидеть: электродвигатели, аккумуляторы и прочее. Для начала нужно выбрать именно тот микроконтроллер, который и будет осуществлять управление. Из всех представленных на рынке микроконтроллеров Arduino мы с вами выберем UnoNano, и в качестве дополнительного чипа обработки информации будет выступать ATmega 328.
Но как сделать гироскутер безопасным? Два аккумулятора у нас будут подсоединены последовательно, так мы получим нужное напряжение. Для электродвигателей, как раз и понадобится сдвоенная мостовая схема. Будет поставлена кнопка готовности, по нажатию которой и будет поступать питание на двигатели. При отжимании этой кнопки, двигатели и сам гироскутер будет отключаться. Нужно это для осуществления безопасной езда самого водителя и нашего средства передвижения.
Микроконтроллер Arduino будет на скорости около 38400 БОД, использовать последовательную связь со схемой XBee. Мы будем использовать два гироскопических датчика InvenSense MPU 6050 на базе модулей GY-521. Они в свою очередь будут считывать информацию о положении платформы. Эти датчики достаточно точны для того, чтобы сделать мини-сигвей. Эти датчики будут расположены на двух дополнительных вспомогательных платах, которые будут осуществлять первичную обработку.

Мы будем использовать шину I2C, она имеет достаточную пропускную способность, чтобы быстро связывать с микроконтроллером Arduino. Гироскопический датчик имеющий адрес 0x68 имеет частоту обновления информации раз в 15 мс. Второй же датчик адресов 0x68 работает напрямую от микроконтроллера. У нас так же есть выключатель нагрузки, он переводит гироскутер в режим удержания баланса, тогда когда платформа находится в ровном положении. В этом режиме гироскутер остается на месте.

Три деревянные детали, на которых и будет располагаться наши колеса и электродвигатели. Рулевой столб, сделан из обычной деревянной палки он будет крепиться к передней части самого гироскутера. Тут можно взять любую палку, даже черенок от швабры. Нужно обязательно учесть тот факт, что аккумуляторы и другие схемы, будут производить давление на платформу и тем самым балансировка будет немного перенастроена, именно в ту часть, где будет больше давление.
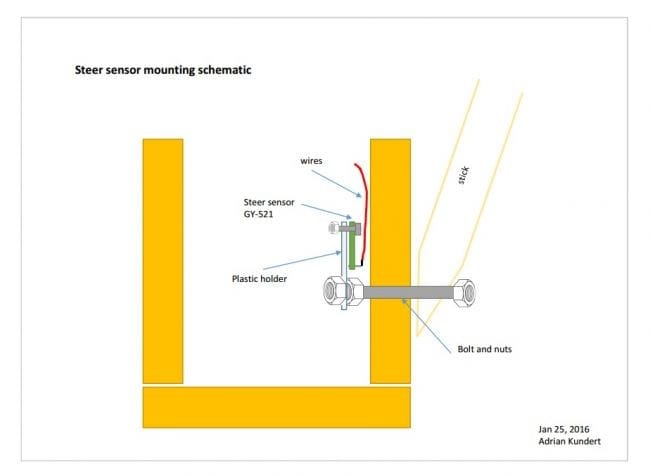
Устанавливка гироскопического датчика
Двигатели же нужно равномерно распределить справа и слева по бокам платформы, а аккумулятор максимально посередине в специальной коробке. Крепим рулевой столб на обычные финты и присоединяем кнопку готовности к верхней части палки. То есть если что-то пошло не так и кнопка отжата, то гироскутер будет выключаться. В дальнейшем эту кнопку можно переделать в подножную часть или настроить на определенный наклон самой платформы, но мы пока делать этого не будем. Закажите доработку сайтов вордпресс здесь.
Устанавливаем на плату микроконтроллер
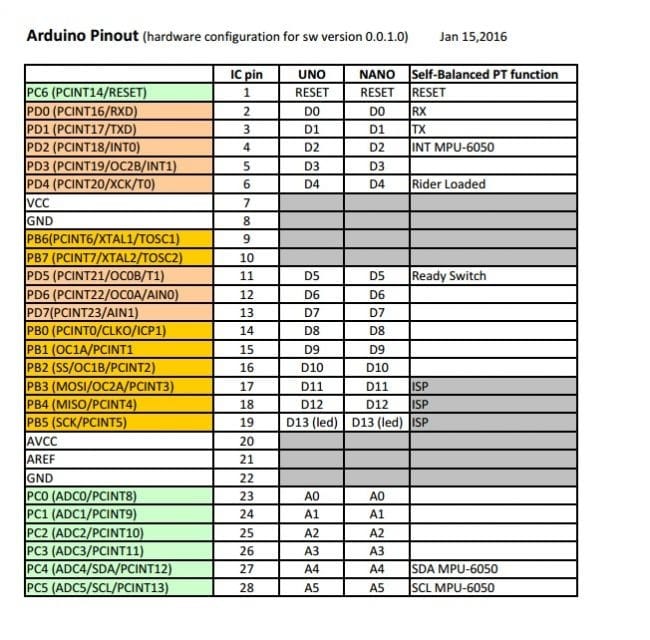
Внутренняя схема и спайка всех проводов, производится по той же схеме. Дальше нужно подключить два гироскопических датчика к нашему микроконтроллеру, по мостовой схеме с двигателем, по данной таблице.
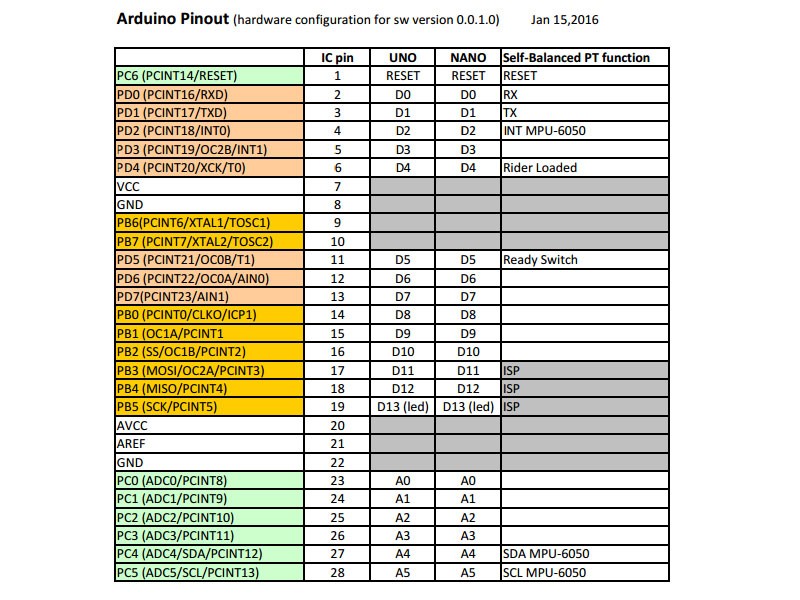
Датчики балансировки должны быть установлены параллельно земле или вдоль самой платформы, а вот датчики поворота направо и налево должны быть установлены перпендикулярно гироскопическим датчикам.

Настройка датчиков
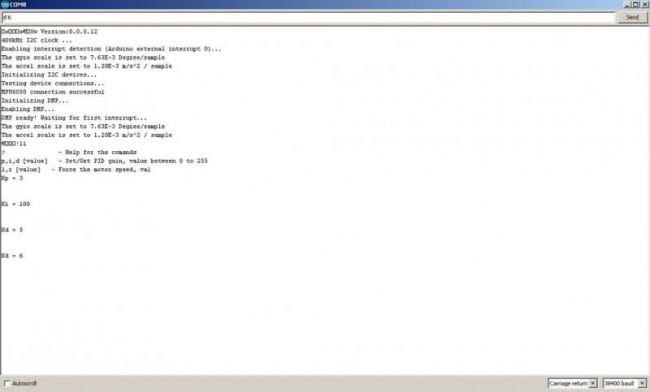
Дальше производим настройку микроконтроллера, загружаем исходный код. Дальше нужно проверить правильную взаимосвязь между гироскопическими датчиками и датчиками поворотов. Используйте программу Arduino Terminal по программированию и настройке гироскутера. Обязательно нужно настроить ПИД регулятор баланса. Дело в том, что вы можете выбрать двигатели с другой мощностью и характеристиками, для них настройка будет другой.
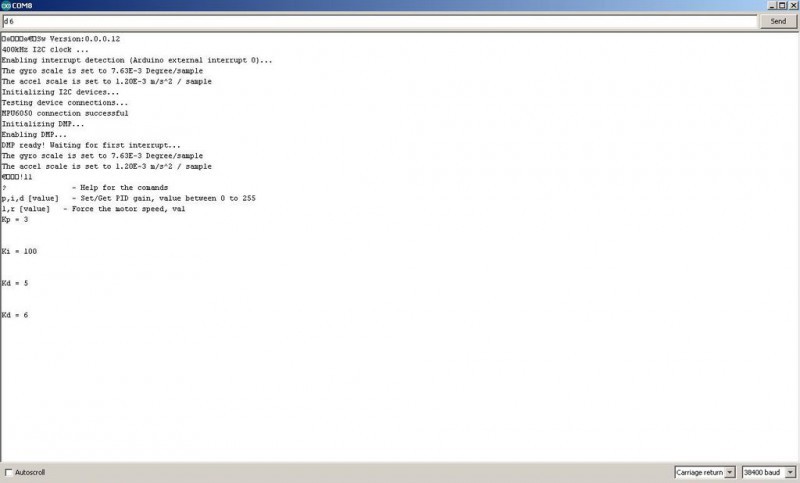
Программа Arduino Terminal
Есть несколько параметров в этой программе. Первый самый главный параметр, это параметр Kp, он отвечает за балансировку. Сначала увеличьте этот показатель, для того чтобы ввести гироскутер в нестабильный вид, а потом уменьшайте показатель до нужного параметра.
Дальше вы включаете кнопку включения микроконтроллера Arduino и гироскутер переходит в режим ожидания. После того как вы встали на сам гироборд, вы встаете ногами на нажимную кнопку, так гироскутер переходит в режим «на месте». Включаются датчики балансировки и при изменении угла наклона, гироскутер едет вперед или назад. При каких либо поломках, можно без проблем осуществить ремонт гироскутера своими руками.
Сигвей своими руками. Сигвей своими руками Как сделать сигвей своими руками
Привет всем мозгочинам ! В моем новом мозгопроекте я буду создавать своими руками самобалансирующееся транспортное средство или «Сегвей». Для данного проекта нужны базовые знания в электронике и умение работать вручную. Все механические компоненты можно приобрести в сети Интернет или в местном магазине.
СЕГВЕЙ состоит из платформы, на которой стоят в вертикальном положении, и двух боковых электродвигателей, приводимых в действие с помощью аккумуляторов. Алгоритм контроллера управления обеспечивает устойчивое положение. Перемещение сегвея контролируется водителем путем наклона его туловища, и ручкой для выбора направления движения влево/вправо. Поэтому вам понадобятся дополнительные компоненты, такие как контроллер, привод двигателя и датчик ускорения/гироскоп. Механическая конструкция изготовлена из дерева, поскольку оно имеет легкий вес, электрически изолировано и легко поддается обработке. Теперь приступим к изготовлению сегвея!
Шаг 1: Основные характеристики проекта
В настоящем проекте требуется изготовить устройство со следующими характеристиками:
— Достаточная мощность и устойчивость для езды по улице, и даже по гравийной дорожке;
— 1 час непрерывной работы
— Общая стоимость до 500€ евро
— Возможность беспроводного управления
— Запись данных на SD-карту для выявления поломок
Шаг 2: Проектирование системы

Датчик наклона установлен горизонтально вдоль оси х, а вертикально вдоль оси у.
Шаг 5: Тестирование и настройка

Примите во внимание, что двигатели должны иметь достаточную мощность. Проверьте устройство в широкой и безопасной зоне, чтобы избежать получения травм или повреждений. Рекомендуется надевать защитные щитки и шлем.
Выполните пошаговую процедуру. Начните с программирования микроконтроллера Arduino (загрузите ), далее проверьте связь с датчиками и мостовой схемой управления.
Arduino Terminal может использоваться для отладки программного кода и проверки работоспособности. Например, нужно настроить усиление ПИД-регулятора, поскольку оно зависит от механических и электрических параметров двигателя.
Усиление настраивается по данной процедуре:
1. Параметр Kp предназначен для балансировки. Увеличивайте Kp, пока балансировка станет нестабильной, Ki и Kp остаются 0. Незначительно снизьте Kp для получения устойчивого состояния.
2. Параметр Ki предназначен для ускорения/снижения ускорения при наклоне. Увеличьте Ki для получения правильного ускорения, чтобы избежать падения при наклоне вперед, Kp остается 0. Теперь балансировка должна стать стабильной.
3. Параметр Kd используется для компенсации включения и возврата к устойчивому положению.
В программе Terminal, вы можете выполнять различные команды «?».
? – Помощь при выборе команд
p,i,d [целочисленное значение] — Установите/Получите усиление ПИД-регулятора, значение от 0 до 255
r [целочисленное значение] – принудительное увеличение скорости двигателя, значение от -127 до 127
v – версия программного обеспечения
С помощью команды «p» вы получаете доступ к параметру Kp. Команда «p 10» позволяет установить Kp до значения 10.
После подачи питания на Arduino выполняется инициализация датчиков и переход в состояние ожидания. При нажатии нажимной кнопки происходит передача управляющего сигнала в контроллер СЕГВЕЯ, находящегося в вертикальном положении, который готов для активации двигателей для перемещения вперед или назад в зависимости от первоначального положения. С этого момента кнопку нужно держать нажатой постоянно, в противном случае двигатели выключатся, и контроллер перейдет в состояние ожидания. После достижения вертикального положения, контроллер ожидает сигнал концевого выключателя нагрузки “Водитель на месте”, который обычно нажимают ногой, когда водитель находится на платформе. После этого запускается алгоритм балансировки и происходит активация двигателей вперед или назад для того, чтобы остаться в вертикальном положении. Наклон вперед создает поступательное движение вперед и наоборот. Нахождение в наклоненном положении приводит к ускорению движения. Наклон в противоположном направлении приводит к снижению скорости. Для перемещения влево и вправо используйте ручку.
Шаг 6: Демо

Смотрите ниже видео готового устройства и спасибо за внимание!
Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.

Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Можно ли смастерить сигвей своими руками? Насколько это сложно, и какие детали для этого потребуются? Будет ли самодельный аппарат выполнять все те же функции, что и изготовленный на заводе? Куча похожих вопросов возникает в голове человека, решившего соорудить своими руками. Ответ на первый вопрос будет прост и ясен: сделать «электросамокат» самому под силу любому человеку, который хоть немного разбирается в электронике, физике и механике. Причем, работать устройство будет ничуть не хуже произведенного на заводском станке.
Как сделать сигвей своими руками?
Если внимательно присмотреться к гироскутеру, то можно разглядеть в нем довольно простое сооружение: это всего лишь самокат, оснащенный системой автоматической балансировки. По обеим сторонам от платформы расположены 2 колеса. Для осуществления эффективного балансирования конструкции сегвеев снабжены системой индикаторной стабилизации. Поступающие с датчиков наклона импульсы транспортируются на микропроцессоры, а те, в свою очередь, производят электрические сигналы. В итоге гироскутер движется в заданном направлении.
Для того чтобы сделать сегвей своими руками, потребуются следующие элементы:
- 2 колеса;
- 2 мотора;
- руль;
- алюминиевые блоки;
- опорная стальная или алюминиевая труба;
- 2 свинцово-кислотные батареи;
- плита из алюминия;
- резисторы;
- аварийный тормоз;
- стальная ось 1,2 см;
- печатная плата;
- конденсаторы;
- LiPo батарея;
- Gate drivers;
- индикаторы led;
- 3 х АTmtga168;
- регулятор напряжения;
- ADXRS614;
- 8 Mosfets;
- два Springs;
- и ADXL203.
Среди перечисленных наименований имеются как механические детали, так и электронные элементы, и прочее оборудование.
Порядок сборки сигвея
Собрать сигвей своими руками не так сложно, как кажется на первый взгляд. При наличии всех необходимых составляющих процесс занимает совсем немного времени.
Сбор механических деталей
- Моторы, колеса, шестерни и аккумуляторы можно позаимствовать у китайских скутеров, а с поиском двигателя проблем вообще нет.
- На большую шестерню, расположенную на руле, осуществляется передача с малой шестерни на двигателе.
- Передача на колесе (12 дюймов) имеет свободный ход — это требует внесения некоторых изменений, необходимых для работы вращающихся элементов в обоих направлениях.
- Неподвижная ось, прикрепленная тремя алюминиевыми блоками (их можно зафиксировать 5-мм установочными винтами), является основой платформы.
- С помощью программы SolidWorks необходимо сделать чертеж детали, которая позволит гироскутеру поворачивать в стороны во время наклона туловища. После этого деталь нужно выточить на станке с ЧПУ. На станке использовалась программа CAMBAM, которая также применялась при изготовлении коробки для блока аварийного тормоза.
- Руль прикрепляется к 2,5-см пустой трубе из стали.
- Для того чтобы рулевая колонка всегда располагалась по центру, а также обратная тяга была более интенсивной, можно задействовать пару стальных пружин.
- Руль оснащается специальной аварийной кнопкой, подключенной к реле — это позволяет снижать мощность мотора.
- Источники питания моторов — аккумуляторные батареи на 24 В.
Сбор электронных деталей
Для того чтобы собрать сигвей своими руками, мало только скрепить механические детали. Электронное управление не менее важно в гироскутере, ведь это достаточно важная составляющая агрегата.
- Печатная плата, имеющая вычислительную функцию, собирает сведения с датчиков — гироскопа, акселерометра, потенциометра, после чего задает направление поворота.
- Без процессора АTmtga168 «самокат» не сможет нормально работать. Соединение с компьютером выполняется посредством Bluetooth и RN-41.
- С помощью двух Н-мостов происходит преобразование импульсов управления с базовой платы на усилие моторов. Каждый мост оснащен АTmtga168, платы сообщаются между собой посредством UART.
- Вся электроника приводится в действие благодаря отдельному аккумулятору.
- Для того чтобы быстро добраться до батарей, а также запрограммировать базовую плату и изменить параметры контуров управления, нужно изготовить небольшую коробку с разъемами, сверху ее корпус оснастить подстроечным потенциометром, а также снабдить переключателем питания электроники.
Программное обеспечение сигвея
Как сделать сигвей своими руками, чтобы он наверняка работал? Верно — установить программное обеспечение (или ПО). Вот необходимые шаги для выполнения этой задачи:
- ПО микроконтроллера имеет в составе фильтр для акселерометра и гироскопа и цикла PD-управления.
- Фильтры Kalman и Complemenatry прекрасно справятся с задачей.
- Написать приложения с помощью языка программирования Java — это позволит видеть степень заряда аккумулятора, все показания датчиков и параметры управления.
Вот, пожалуй, и все, что требуется от человека, который решил самостоятельно смастерить сигвей. Понимание тематики и процесса, а также необходимые компоненты позволят соорудить отличный гироскутер в домашних условиях.
Гироскутер внутри
Основные детали
Из чего состоит гироскутер? Если взглянуть со стороны, то гироскутер представляет из себя интересное устройство. Первое — это рабочая платформа или доска. Именно на нее встает человек и, пытаясь держать баланс, управляет, ездит или падает. По бокам от платформы есть два колеса, именно они и дают нам возможность ездить и двигаться вперед или назад.
Сначала разберемся с платформой. Рабочая платформа разделена на две части, на правую и левую часть. Как раз для правой и левой ноги. Сделано это для того, чтобы была возможность поворачивать вправо или влево, как раз за счет нажатия носком на эти платформы.
Как устроен гироскутер?

Мини-сигвей устройство
Колеса
По бокам идут два колеса. Обычно гироскутеры бывают 4-ех видов, и различаются они по классу и размеру колес. Первый класс гироскутеров является детский гироскутер с колесами в диаметре 4.5 дюймов. Маленький размер колес делает гироскутер очень неудобным и не проходимым в некоторых участках дороги.
Следующий класс — это гироскутер 6.5 дюймов. Он имеет уже больший диаметр колес, но все также предназначен только для езды по ровным поверхностям. Гироскутер 8 дюймов, является золотой серединой среди всех гиробордов. Он имеет оптимальный размер колес, который может проехать практически по любым дорогам.
И самый большой является внедорожник всех мини-сигвеев — гироскутер 10 дюймов . Это модель, у которой есть интересная особенность, помимо больших колес, эти колеса имеют камерную систему. То есть колеса надувные, они имеют более плавный ход, и такие гироскутеры более износостойкие чем прототипы поменьше.

Корпус
Корпус у всех гироскутеров сделан из разных материалов, но с одной и той же особенностью. Везде корпус закрывает колеса, защищая от брызг, грязи, воды, снега и пыли. Гироскутеры с маленькими колесами 4.5 и 6, обычно делают из обычного пластика. Так как эти модели предназначены для езды по ровной дороге, и развивают не такую высокую скорость, то инженеры решили не ставить дорогой пластик и не увеличивать тем самым цену на гироскутер.
У гироскутера с 8-ми дюймовыми колесами , корпуса делают из различных материалов, как из простого пластика, так и из карбона, ударопрочного магниевого пластика. Такой пластик, способен выдержать практически любое физическое воздействие и удары. Карбон к примеру еще и легкий материал, тем самым он снижает нагрузку на электродвигатели и уменьшает скорость разрядки батареи.

Двигатели
После того как вы снимите крышку, по бокам ближе к колесу вы должны увидеть электродвигатель. Электродвигатели бывают разной мощности. Среднее значение среди всех мини-сигвеев является показатель 700 Ватт на оба колеса. Или по 350 Ватт на одно колесо. Дело в том, что электродвигатели у гироскутеров работают независимо друг от друга. Одно колесо может ехать с одной скоростью, а второе с другой, или они могут двигаться в разные стороны, одно назад, другое вперед. Таким образом эта система придает гироскутеру управляемости.
Он становится более чувствительным к поворотам на большой скорости. Также вы можете разворачиваться на места на 360 градусов. Чем выше мощность у двигателя, тем выше переносимый груз и тем выше скорость, но не всегда. Надо понимать, что чем выше масса нагрузки на платформу, тем ниже скорость и быстрее разряжается батарея. Поэтому гироскутеры с мощными двигателями стоят дороже.

Система балансировки
Система балансировки состоит и включает в себя довольно много компонентов. В первую очередь, это два гироскопических датчика, которые расположены в правой и левой части платформы. Если снять крышку корпуса, то можно увидеть две вспомогательные платы, именно к ним и подсоединены гироскопические датчики. Вспомогательные платы, помогают обрабатывать информацию и отправлять ее в процессор.
Дальше в правой части можно увидеть основную плату, именно там стоит 32-ух битный процессор и осуществляется все управление и вычисление. Там же и стоит программа, которая реагирует на любое изменение платформы справа или слева.
Если платформа наклоняется вперед, то процессор, обработав информацию, посылает сигнал электродвигателям, которые физически удерживают доску в ровном положении. Но если платформа наклоняется сильнее с определенным давлением, колесо начинает сразу движение вперед или назад.

Нужно обязательно помнить, что во всех нынешних гироскутерах должны быть две вспомогательные платы для гироскопических датчиков и одна основная, где стоит процессор. В старых моделях может стоять и двухплатная система, но с осени 2015 года, в стандарт была внесено изменение и теперь все гироскутеры, мини-сигвеи делаются с 3-мя платами.
В китайских подделках или некачественных гироскутерах, может стоять одна плата, основная. К сожалению такой мини-сигвей имеет плохие характеристики в управлении. Может вибрировать или опрокидывать водителя. А в последствии вся система вообще может выйти из строя.
Схема внутреннего устройства управления гироскутером не такая сложная как кажется. Вся система сделана так, чтобы максимально быстро реагировать на любое поведение платформы. Расчет идет в доли секунды и с поразительной точностью.

Батарея
Система питания гироскутера осуществляется от двух или более аккумуляторов. В стандартных недорогих моделях обычно ставят аккумулятор с мощностью 4400 мА/ч. Аккумулятор отвечает за работу всей системы в целом и обеспечения ее электроэнергией, поэтому батарея должна быть качественная и фирменная. Обычно используют аккумуляторы двух брендов — это Samsung и LG.
Также аккумуляторы различаются по классу. Есть низкоуровневые батареи классов 1С, 2С. Такие аккумуляторы обычно ставят на гироскутеры с 4.5 и 6.5 дюймовыми колесами. Все по той же причине, потому что эти гироскутеры предназначены для ровных дорог, ровному асфальту, мрамору или полу.

Гироскутеры с 8-ми дюймовыми колесами, обычно ставят аккумуляторы среднего класса типа 3С, это уже более надежная модель батареи. Она не будет отключаться при резкой остановке или при наезде на бордюр или в яму.
У большеколесных 10-ти дюймовых моделях, обычно ставят аккумуляторы 5С класса. Этот гироскутер способен ездить практически по любым дорогам, земле, лужам, ямам. Поэтому батарея нужно более надежная.
Основной принцип устройства гироскутера обусловлен в удержании равновесии. При большом весе водителя гироскутеру нужно больше электроэнергии для осуществления маневров и движения.

Другое
Во многих гироскутерах также ставят Bluetooth систему и колонки. С помощью нее вы сможете слушать любимую музыку и кататься с друзьями. Но эта система еще дает возможность подсоединять свой смартфон к гироскутеру и следить за состоянием своего средства передвижения. Можно следить за средней скоростью, смотреть какой расстояние вы преодолели. Настроить максимальную допустимую скорость и много чего еще.
Еще на многих моделях стоит подсветка, она освещает вам путь в темноте, и так же может ярко мигать в такт с музыкой. Но нужно помнить, что музыка и подсветка сильно садят батарею. Многие вообще отключают подсветку, чтобы увеличить запас хода.
Вывод
Конструкция гироскутера сделана так, чтобы он был компактным и легким, но при этом быстрым, мощным и долговечным. Главное покупать гироскутер у проверенных поставщиков, у которых есть вся необходимая документация, чтобы не пришлось разбирать его после неудачного катания.
Китайский сигвей – фото внешнего вида
До недавнего времени я вообще не знал, как называется “ну, такая каталка на двух колёсах, ехать стоя”. Недавно узнал, что этот электросамокат на двух колесах называется Сегвей или Сигвей , по-английски – Segway . Кто до сих пор не понял, о чем речь – фото слева.
Подробнее об этом замечательном двухколесном самокате можно узнать в википедии или на сайтах продавцов, я же опишу его коротко, и перейду к главному – устройству и ремонту сигвея. Будет много фото, а также подробное описание электрической схемы сигвея.
Это замечательное устройство позволяет человеку легко передвигаться на двух колёсах. При этом в систему управления сигвеем входит система балансировки, практически исключающая возможность падения.
Слово “практически” меня всегда настораживает. Так и в этот раз.
Но обо всём по порядку.
Поломка сигвея
Моя история началась как раз с того, что человек на сигвее упал. Ехал на приличной скорости, и – носом в асфальт!
Я начал разбираться, в чём дело. Оказалось, что при повороте ключа зажигания из этого ключа шли искры, и колеса при этом были заторможены. Ошибок на дисплее не было, но это только потому, что аппарат фактически не мог включиться – искрение в контактах замка привело к тому, что контакты покрылись нагаром, и ток от батареи не поступал на схему.

Странно, что контакты не пригорели и не слиплись намертво, впрочем, тогда бы выгорела проводка, т.к. при токе около 100 Ампер предусмотрено не было, а штатные предохранители остались целы.
Да, стоит сказать, что этот сигвей был дешевой подделкой, и куплен дней за десять до поломки. Всё было написано по китайски (насколько я разбираюсь в китайском), кроме “Warning!” Впрочем, о качестве сборки можно будет судить по фото.
Причина поломки – сгорели силовые транзисторы, через которые питались двигатели. Но об этом подробнее чуть позже.
Устройство сигвея. Разборка
Что мне конкретно понравилось – это колёса с солидными протекторами. То есть, предполагается, что этот самокат может использоваться в тяжелых условиях.

Однако, платы вообще не защищены от воздействия влаги, нет даже никакого лака. И вообще никаких резиновых прокладок от влаги не предусмотрено…
Руль прикручивается, его можно открутить при транспортировке:

Крепление руля. Вид спереди.
А вот вид сзади:

Предохранители и разъем зарядки
Видно два предохранителя по 50 А (схема сигвея будет чуть ниже), разъем заряда аккумулятора, над всем этим – “фары” в виде светодиодов на 12 В.
Верхняя панель. На ней – основные органы управления и индикации:

Верхняя панель сигвея
Вверху – дисплей, который показывает заряд батареи, ниже – предупреждения, которые необходимо внимательно прочитать, прежде чем становиться за руль. Если что непонятно – позвонить по телефону)
Три светодиода индицируют состояние сегвея: 1 – поворот влево, 2 – поворот вправо, 3 – горизонтальное положение (положение, в котором человек может становиться и начинать движение)
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:


Сигвей со снятыми колесами
Снимаем переднюю панель.

Снимаем верхнюю крышку
Выглядит весьма непрезентабельно, но это только начало.

Передняя панель сзади. Провода откинуты. Замок снят.
К рулевой колонке рулю, который поворачивается только вправо и влево, приделан переменный резистор, распознающий наклон руля, и дающий сигнал контроллеру на поворот.

Переменный резистор наклона руля
Сопротивление – 10 кОм, линейная характеристика.
Так и хочется сказать – “потроха”

Как я уже говорил, качество сборки отвратительное. Хотя, по механике особых претензий нет.
Электронная начинка сигвея
Теперь подробнее рассмотрим электронику сигвея.
Вот фото подключения платы управления.

Устройство крупнее и подключение платы
Силовые транзисторы – IRF4110:

Силовые транзисторы платы управления
Именно парочка этих транзисторов и сгорела. При этом эта пара замкнула на себя питание аккумулятора, образовав КЗ.

Электронная схема сигвея – общий вид
Рассмотрим элементы схемы подробнее.

Электронная схема сигвея – общий вид – другой ракурс
Схема в общем не большая, разобьем её на несколько частей – приемник, контроллер, электронный гироскоп, драйвера транзисторов, силовые транзисторы, блок питания.

Микросхемки IC3, IC4 – это радиоканал, который позволяет управлять сигвеем с пульта. То есть, настраивать его, калибровать, блокировать, диагностировать.
Микросхема IC2 – контроллер ATMEGA 32A. Это сердце сигвея, точнее, мозг. Тут заложено самое главное – программа, алгоритм работы. Именно эта программа управляет вращением колёс и не дает человеку упасть.

Если контроллер – мозг, то гироскоп – это органы чувств. Гироскоп – это маленькая микросхемка INVENSENCE MPU6050. Это замечательное устройство представляет собой трехканальный измеритель положения в пространстве (наклон по трем осям) и трехканальный измеритель ускорения. Если кто помнит из физики, ускорение – это скорость изменения скорости. Честно, не понимаю, как в этот чип можно впихнуть такие измерители. Я до сих пор знал электромеханические гироскопы, а акселерометры знал только электронные. Теперь узнал, что бывают и такие, и используются очень широко, в основном в мобильной и автомобильной электронике.
На последнем фото также видно две микросхемы буферов CD4001 (это 2И-НЕ). Это для развязки контроллера и остальной схемы. Далее сигнал управления поступает на драйвера IR2184S, которые подают напряжения на затворы силовых полевиков, фото которых я давал выше.

Блок питания XL7015 – преобразователь DC-DC, из плавающего постоянного напряжения около 48В он путем преобразований на частоте несколько килогерц выдает стабильное постоянное напряжение 15В. Далее – обычная КРЕНка 7805 выдает 5 Вольт. Желтая топорная перемычка была, я тут ни при чём. А вот сгоревшая дорожка вверху справа – это путь питания 0В на управление, её пришлось восстанавливать.
Слаботочные элементы схемы сигвея соединяются через кросс-плату:

На эту плату приходят сигналы: от потенциометра руля, от кнопок наличия человека, к светодиодам панели управления. И уходят провода на главную плату.
Вот двигателя с редукторами, на оси которых непосредственно насаживаются колёса. Добротно сделано, только никаких опознавательных знаков:

Двигатель колеса с редуктором
Аккумулятор тоже не содержит никаких надписей:

Входят два провода для зарядки (потоньше) и два выходных провода.
Видите искореженные места? Аккумулятор вообще никак не закреплен, болтается в сигвее, и бьётся об острые края ребер жесткости.
В общем, сделано на … короче, плохо сделано, и так или иначе скорая поломка сигвея была неизбежной.
Ещё примочка – преобразователь, также валялся на дне, замотан в плёнку. Поскольку светодиоды габаритных огней рассчитаны на напряжение 12 В, а аккумулятор – на 48 В, то используется преобразователь постоянного напряжения DC-DC 48-12 В:
Ремонт segway
Ремонт сибвея свелся к замене силовых транзисторов, их драйвера, и резисторов обвязки. Также восстановлена перегоревшая дорожка, замок с ключом заменен на обычные тумблеры, и в схему включен защитный автомат на 63 А. Надеюсь, в случае чего, он спасет схему от выгорания.
Только в этом случае опять пострадает и чей-то нос.
Так что прогноз пессимистичный, покупайте только качественные вещи, особенно, если речь идёт о безопасности! Теперь понятно, почему на всех фото ездок на сигвее с надетым шлемом…
Езда на Segway
Езда на подобном оригинальном внедорожном сигвее (в спокойном режиме) показана на видео:
Также в видео подробно рассказано про технические характеристики этого замечательного устройства.

Просмотры: 6646 ; Комментарии: 0 Кремлевская башня, или Спасская, была построена в 1491 году по проекту Пьетро Антонио Солари, надстроили ее в 1625 году. Появление на башне кремлевских курантов.
Спасская башня. Кремлёвские Куранты. Интересные факты о Московском Кремле (15 фото) Современный вид Кремля
Источники:
https://rusrappers.ru/kak-samomu-sdelat-sigvey-2/
https://rusrappers.ru/kak-samomu-sdelat-sigvey/
https://stroynietela.ru/kak-sdelat-sigvey-doma/
https://tabloid40.ru/spalnya/sigvei-svoimi-rukami-sigvei-svoimi-rukami-kak-sdelat-sigvei/