Гусеничный сигвей своими руками. Как изготовить своими руками сегвей
До недавнего времени я вообще не знал, как называется “ну, такая каталка на двух колёсах, ехать стоя”. Недавно узнал, что этот электросамокат на двух колесах называется Сегвей или Сигвей , по-английски – Segway . Кто до сих пор не понял, о чем речь – фото слева.
Подробнее об этом замечательном двухколесном самокате можно узнать в википедии или на сайтах продавцов, я же опишу его коротко, и перейду к главному – устройству и ремонту сигвея. Будет много фото, а также подробное описание электрической схемы сигвея.
Это замечательное устройство позволяет человеку легко передвигаться на двух колёсах. При этом в систему управления сигвеем входит система балансировки, практически исключающая возможность падения.
Слово “практически” меня всегда настораживает. Так и в этот раз.
Но обо всём по порядку.
Поломка сигвея
Моя история началась как раз с того, что человек на сигвее упал. Ехал на приличной скорости, и – носом в асфальт!
Я начал разбираться, в чём дело. Оказалось, что при повороте ключа зажигания из этого ключа шли искры, и колеса при этом были заторможены. Ошибок на дисплее не было, но это только потому, что аппарат фактически не мог включиться – искрение в контактах замка привело к тому, что контакты покрылись нагаром, и ток от батареи не поступал на схему.

Странно, что контакты не пригорели и не слиплись намертво, впрочем, тогда бы выгорела проводка, т.к. при токе около 100 Ампер предусмотрено не было, а штатные предохранители остались целы.
Да, стоит сказать, что этот сигвей был дешевой подделкой, и куплен дней за десять до поломки. Всё было написано по китайски (насколько я разбираюсь в китайском), кроме “Warning!” Впрочем, о качестве сборки можно будет судить по фото.
Причина поломки – сгорели силовые транзисторы, через которые питались двигатели. Но об этом подробнее чуть позже.
Устройство сигвея. Разборка
Что мне конкретно понравилось – это колёса с солидными протекторами. То есть, предполагается, что этот самокат может использоваться в тяжелых условиях.

Однако, платы вообще не защищены от воздействия влаги, нет даже никакого лака. И вообще никаких резиновых прокладок от влаги не предусмотрено…
Руль прикручивается, его можно открутить при транспортировке:

Крепление руля. Вид спереди.
А вот вид сзади:

Предохранители и разъем зарядки
Видно два предохранителя по 50 А (схема сигвея будет чуть ниже), разъем заряда аккумулятора, над всем этим – “фары” в виде светодиодов на 12 В.
Верхняя панель. На ней – основные органы управления и индикации:

Верхняя панель сигвея
Вверху – дисплей, который показывает заряд батареи, ниже – предупреждения, которые необходимо внимательно прочитать, прежде чем становиться за руль. Если что непонятно – позвонить по телефону)
Три светодиода индицируют состояние сегвея: 1 – поворот влево, 2 – поворот вправо, 3 – горизонтальное положение (положение, в котором человек может становиться и начинать движение)
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:


Сигвей со снятыми колесами
Снимаем переднюю панель.

Снимаем верхнюю крышку
Выглядит весьма непрезентабельно, но это только начало.

Передняя панель сзади. Провода откинуты. Замок снят.
К рулевой колонке рулю, который поворачивается только вправо и влево, приделан переменный резистор, распознающий наклон руля, и дающий сигнал контроллеру на поворот.

Переменный резистор наклона руля
Сопротивление – 10 кОм, линейная характеристика.
Так и хочется сказать – “потроха”

Как я уже говорил, качество сборки отвратительное. Хотя, по механике особых претензий нет.
Электронная начинка сигвея
Теперь подробнее рассмотрим электронику сигвея.
Вот фото подключения платы управления.

Устройство крупнее и подключение платы
Силовые транзисторы – IRF4110:

Силовые транзисторы платы управления
Именно парочка этих транзисторов и сгорела. При этом эта пара замкнула на себя питание аккумулятора, образовав КЗ.

Электронная схема сигвея – общий вид
Рассмотрим элементы схемы подробнее.

Электронная схема сигвея – общий вид – другой ракурс
Схема в общем не большая, разобьем её на несколько частей – приемник, контроллер, электронный гироскоп, драйвера транзисторов, силовые транзисторы, блок питания.

Микросхемки IC3, IC4 – это радиоканал, который позволяет управлять сигвеем с пульта. То есть, настраивать его, калибровать, блокировать, диагностировать.
Микросхема IC2 – контроллер ATMEGA 32A. Это сердце сигвея, точнее, мозг. Тут заложено самое главное – программа, алгоритм работы. Именно эта программа управляет вращением колёс и не дает человеку упасть.

Если контроллер – мозг, то гироскоп – это органы чувств. Гироскоп – это маленькая микросхемка INVENSENCE MPU6050. Это замечательное устройство представляет собой трехканальный измеритель положения в пространстве (наклон по трем осям) и трехканальный измеритель ускорения. Если кто помнит из физики, ускорение – это скорость изменения скорости. Честно, не понимаю, как в этот чип можно впихнуть такие измерители. Я до сих пор знал электромеханические гироскопы, а акселерометры знал только электронные. Теперь узнал, что бывают и такие, и используются очень широко, в основном в мобильной и автомобильной электронике.
На последнем фото также видно две микросхемы буферов CD4001 (это 2И-НЕ). Это для развязки контроллера и остальной схемы. Далее сигнал управления поступает на драйвера IR2184S, которые подают напряжения на затворы силовых полевиков, фото которых я давал выше.

Блок питания XL7015 – преобразователь DC-DC, из плавающего постоянного напряжения около 48В он путем преобразований на частоте несколько килогерц выдает стабильное постоянное напряжение 15В. Далее – обычная КРЕНка 7805 выдает 5 Вольт. Желтая топорная перемычка была, я тут ни при чём. А вот сгоревшая дорожка вверху справа – это путь питания 0В на управление, её пришлось восстанавливать.
Слаботочные элементы схемы сигвея соединяются через кросс-плату:

На эту плату приходят сигналы: от потенциометра руля, от кнопок наличия человека, к светодиодам панели управления. И уходят провода на главную плату.
Вот двигателя с редукторами, на оси которых непосредственно насаживаются колёса. Добротно сделано, только никаких опознавательных знаков:

Двигатель колеса с редуктором
Аккумулятор тоже не содержит никаких надписей:

Входят два провода для зарядки (потоньше) и два выходных провода.
Видите искореженные места? Аккумулятор вообще никак не закреплен, болтается в сигвее, и бьётся об острые края ребер жесткости.
В общем, сделано на … короче, плохо сделано, и так или иначе скорая поломка сигвея была неизбежной.
Ещё примочка – преобразователь, также валялся на дне, замотан в плёнку. Поскольку светодиоды габаритных огней рассчитаны на напряжение 12 В, а аккумулятор – на 48 В, то используется преобразователь постоянного напряжения DC-DC 48-12 В:
Ремонт segway
Ремонт сибвея свелся к замене силовых транзисторов, их драйвера, и резисторов обвязки. Также восстановлена перегоревшая дорожка, замок с ключом заменен на обычные тумблеры, и в схему включен защитный автомат на 63 А. Надеюсь, в случае чего, он спасет схему от выгорания.
Только в этом случае опять пострадает и чей-то нос.
Так что прогноз пессимистичный, покупайте только качественные вещи, особенно, если речь идёт о безопасности! Теперь понятно, почему на всех фото ездок на сигвее с надетым шлемом…
Езда на Segway
Езда на подобном оригинальном внедорожном сигвее (в спокойном режиме) показана на видео:
Также в видео подробно рассказано про технические характеристики этого замечательного устройства.
В этой статье будет рассмотрено создание самобалансирующегося средства передвижения или просто «Сегвей». Практически все материалы для создания данного устройства легкодоступны.
Само устройство представляет из себя платформу на которой стоит водитель. Путем наклона туловища осуществляется управление двумя электрическими двигателями посредством цепи схем и микроконтроллеров, отвечающих за балансировку.

-Беспроводной модуль управления XBee.
-микроконтроллер Arduino
-аккумуляторы
-датчик InvenSense MPU-6050 на модуле “GY-521”,
-деревянные бруски
-кнопка
-два колеса
и прочее, указанное в статье и на фотографиях.
Шаг первый: Определение требуемых характеристик и проектирование системы.
При создании этого устройства автор старался, чтобы оно укладывалась в такие параметры как:
-проходимость и мощность, необходимая для свободного перемещения даже по гравию
-аккумуляторы достаточной емкостью, чтобы обеспечить как минимум один час беспрерывной работы устройства
-обеспечить возможность беспроводного управления, а так же фиксирование данных о работе устройства на SD-карту для выявления и устранения неисправностей.
Кроме того желательно, чтобы затраты на создание подобного устройства были меньше чем заказ оригинального внедорожного гироскутера.
Согласно приведенной ниже диаграмме, вы можете увидеть схему электрической цепи самобалансирующегося транспортного средства.

На следующем изображении показана система работы привода гироскутера.

Выбор микроконтроллера для управления системами Сегвея разнообразен, автор система Arduino наиболее предпочтительна из-за своих ценовых категорий. Подойдут такие контроллеры как Arduino Uno, Arduino Nano или можно взять ATmega 328 для использования в качестве отдельного чипа.
Чтобы запитать сдвоенную мостовую схему управления двигателей необходимо напряжение питания в 24 В, этого напряжения легко достигнуть путем последовательного подключения 12 В автомобильных аккумуляторов.
Система построена так, что питание на двигатели подается, только пока нажата кнопка старта, поэтому для быстрой остановки достаточно просто ее отпустить. При этом платформа Arduino должна поддерживать последовательную связь, как с мостовой схемой управления двигателей, так и с беспроводным модулем управления.
За счет датчика InvenSense MPU-6050 на модуле “GY-521”, обрабатывающего ускорение и несущего в себе функции гироскопа, измеряются параметры наклона. Датчик был расположен на двух отдельных платах расширения. По шине l2c поддерживается связь с микроконтроллером Arduino. Причем датчик наклона с адресом 0x68 был запрограммирован таким образом, чтобы выполнять опрос каждый 20 мс и обеспечивать прерывание микроконтроллера Arduino. Другой датчик имеет адрес 0x69 и он подтянут прямо к Arduino.
Когда пользователь встает на платформу скутера, срабатывает концевой выключатель нагрузки, который и активирует режим алгоритма для балансировки Сегвея.
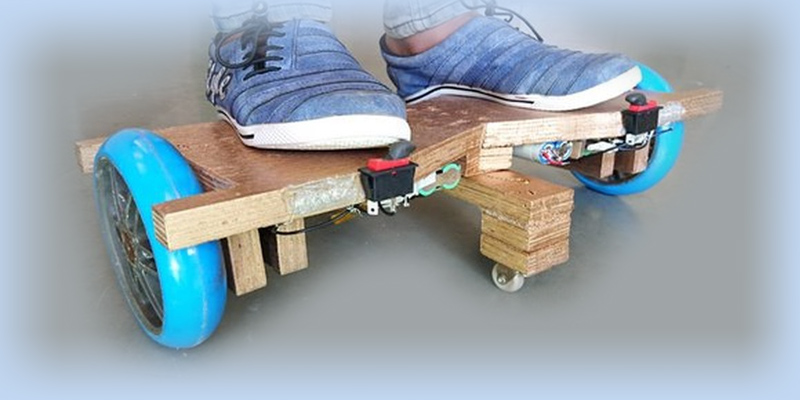
Шаг второй: Создание корпуса гироскутера и установка основных элементов.






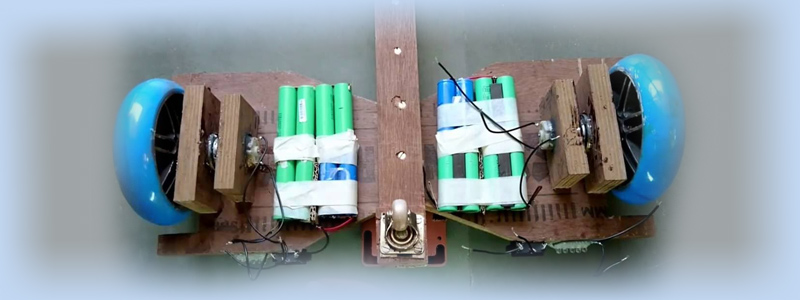
После определения основной концепции схемы работы гироскутера, автор приступил к непосредственной сборке его корпуса и установке основных деталей. В качестве основного материала послужили деревянные доски и бруски. Дерево мало весит, что положительно отразится на длительности заряда аккумуляторов, кроме того древесина легко обрабатывается и является изолятором. Из этих досок был сделан короб, в который будут устанавливаться аккумуляторы, двигатели и микросхемы. Таким образом, получилась U-образная деревянная деталь, на которую за счет болтов крепятся колеса и двигатели.
Передача мощности двигателей на колеса будет идти за счет зубчатой передачи. Во время укладки основных компонентов в корпус Сегвея очень важно проследить, чтобы вес распределялся равномерно при приведении Сегвея в рабочее вертикальное положение. Поэтому если не учесть распределение веса от тяжелых аккумуляторов, то работа балансировки устройства будет затруднена.
В данном случае автор расположил аккумуляторы сзади, так, что компенсировать вес двигателя, который находится в центре корпуса устройства. Электронные составляющие устройства были уложены в место между двигателем и аккумуляторами. Для последующего тестирования так же была прикреплена временная кнопка старта на ручке Сегвея.
Шаг третий: Электрическая схема.




Согласно приведенной схеме была осуществлена вся провода в корпусе Сегвея. Так же в соответствии с таблицей приведенной ниже были подключены все выводы микроконтроллера Arduino к мостовой схеме управления двигателем, а так же к датчикам балансировки.

На следующей схеме, показано установленный горизонтально датчик наклона, датчик управления же был установлен вертикально по оси У.

Шаг четвертый: Тестирование и настройка устройства.


После проведения предыдущих этапов, автор получил модель Сегвея для тестирования.
При проведении тестирования важно принять во внимание такие факторы как безопасность зоны тестирования, а так же защитная экипировка в виде защитных щитков и шлема для водителя.
Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.

Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Можно ли смастерить сигвей своими руками? Насколько это сложно, и какие детали для этого потребуются? Будет ли самодельный аппарат выполнять все те же функции, что и изготовленный на заводе? Куча похожих вопросов возникает в голове человека, решившего соорудить своими руками. Ответ на первый вопрос будет прост и ясен: сделать «электросамокат» самому под силу любому человеку, который хоть немного разбирается в электронике, физике и механике. Причем, работать устройство будет ничуть не хуже произведенного на заводском станке.
Как сделать сигвей своими руками?
Если внимательно присмотреться к гироскутеру, то можно разглядеть в нем довольно простое сооружение: это всего лишь самокат, оснащенный системой автоматической балансировки. По обеим сторонам от платформы расположены 2 колеса. Для осуществления эффективного балансирования конструкции сегвеев снабжены системой индикаторной стабилизации. Поступающие с датчиков наклона импульсы транспортируются на микропроцессоры, а те, в свою очередь, производят электрические сигналы. В итоге гироскутер движется в заданном направлении.
Для того чтобы сделать сегвей своими руками, потребуются следующие элементы:
- 2 колеса;
- 2 мотора;
- руль;
- алюминиевые блоки;
- опорная стальная или алюминиевая труба;
- 2 свинцово-кислотные батареи;
- плита из алюминия;
- резисторы;
- аварийный тормоз;
- стальная ось 1,2 см;
- печатная плата;
- конденсаторы;
- LiPo батарея;
- Gate drivers;
- индикаторы led;
- 3 х АTmtga168;
- регулятор напряжения;
- ADXRS614;
- 8 Mosfets;
- два Springs;
- и ADXL203.
Среди перечисленных наименований имеются как механические детали, так и электронные элементы, и прочее оборудование.
Порядок сборки сигвея
Собрать сигвей своими руками не так сложно, как кажется на первый взгляд. При наличии всех необходимых составляющих процесс занимает совсем немного времени.
Сбор механических деталей
- Моторы, колеса, шестерни и аккумуляторы можно позаимствовать у китайских скутеров, а с поиском двигателя проблем вообще нет.
- На большую шестерню, расположенную на руле, осуществляется передача с малой шестерни на двигателе.
- Передача на колесе (12 дюймов) имеет свободный ход — это требует внесения некоторых изменений, необходимых для работы вращающихся элементов в обоих направлениях.
- Неподвижная ось, прикрепленная тремя алюминиевыми блоками (их можно зафиксировать 5-мм установочными винтами), является основой платформы.
- С помощью программы SolidWorks необходимо сделать чертеж детали, которая позволит гироскутеру поворачивать в стороны во время наклона туловища. После этого деталь нужно выточить на станке с ЧПУ. На станке использовалась программа CAMBAM, которая также применялась при изготовлении коробки для блока аварийного тормоза.
- Руль прикрепляется к 2,5-см пустой трубе из стали.
- Для того чтобы рулевая колонка всегда располагалась по центру, а также обратная тяга была более интенсивной, можно задействовать пару стальных пружин.
- Руль оснащается специальной аварийной кнопкой, подключенной к реле — это позволяет снижать мощность мотора.
- Источники питания моторов — аккумуляторные батареи на 24 В.
Сбор электронных деталей
Для того чтобы собрать сигвей своими руками, мало только скрепить механические детали. Электронное управление не менее важно в гироскутере, ведь это достаточно важная составляющая агрегата.
- Печатная плата, имеющая вычислительную функцию, собирает сведения с датчиков — гироскопа, акселерометра, потенциометра, после чего задает направление поворота.
- Без процессора АTmtga168 «самокат» не сможет нормально работать. Соединение с компьютером выполняется посредством Bluetooth и RN-41.
- С помощью двух Н-мостов происходит преобразование импульсов управления с базовой платы на усилие моторов. Каждый мост оснащен АTmtga168, платы сообщаются между собой посредством UART.
- Вся электроника приводится в действие благодаря отдельному аккумулятору.
- Для того чтобы быстро добраться до батарей, а также запрограммировать базовую плату и изменить параметры контуров управления, нужно изготовить небольшую коробку с разъемами, сверху ее корпус оснастить подстроечным потенциометром, а также снабдить переключателем питания электроники.
Программное обеспечение сигвея
Как сделать сигвей своими руками, чтобы он наверняка работал? Верно — установить программное обеспечение (или ПО). Вот необходимые шаги для выполнения этой задачи:
- ПО микроконтроллера имеет в составе фильтр для акселерометра и гироскопа и цикла PD-управления.
- Фильтры Kalman и Complemenatry прекрасно справятся с задачей.
- Написать приложения с помощью языка программирования Java — это позволит видеть степень заряда аккумулятора, все показания датчиков и параметры управления.
Вот, пожалуй, и все, что требуется от человека, который решил самостоятельно смастерить сигвей. Понимание тематики и процесса, а также необходимые компоненты позволят соорудить отличный гироскутер в домашних условиях.
Давайте поговорим о том как можно использовать Ардуино для создания робота, который балансирует как Сигвей.
Сигвей от англ. Segway – двухколесное средство передвижения стоя, оснащенное электроприводом. Еще их называют гироскутерами или электрическими самокатами.
Вы когда-нибудь задумывались, как работает Сигвей? В этом уроке мы постараемся показать вам, как сделать робота Ардуино, который уравновешивает себя точно так же, как Segway.
Чтобы сбалансировать робота, двигатели должны противодействовать падению робота. Это действие требует обратной связи и корректирующих элементов. Элемент обратной связи — , который обеспечивает как ускорение, так и вращение во всех трех осях (). Ардуино использует это, чтобы знать текущую ориентацию робота. Корректирующим элементом является комбинация двигателя и колеса.
В итоге должен получиться примерно такой друг:
Схема робота

Модуль драйвера двигателя L298N:
Мотор редуктора постоянного тока с колесом:
Самобалансирующийся робот по существу является перевернутым маятником. Он может быть лучше сбалансирован, если центр массы выше относительно колесных осей. Высший центр масс означает более высокий момент инерции массы, что соответствует более низкому угловому ускорению (более медленное падение). Вот почему мы положили батарейный блок на верх. Однако высота робота была выбрана исходя из наличия материалов 🙂
Завершенный вариант самостоятельно балансирующего робота можно посмотреть на рисунке выше. В верхней части находятся шесть Ni-Cd-батарей для питания печатной платы. В промежутках между моторами используется 9-вольтовая батарея для драйвера двигателя.
Теория
В теории управления, удерживая некоторую переменную (в данном случае позицию робота), требуется специальный контроллер, называемый ПИД (пропорциональная интегральная производная). Каждый из этих параметров имеет «прирост», обычно называемый Kp, Ki и Kd. PID обеспечивает коррекцию между желаемым значением (или входом) и фактическим значением (или выходом). Разница между входом и выходом называется «ошибкой».
ПИД-регулятор уменьшает погрешность до наименьшего возможного значения, постоянно регулируя выход. В нашем самобалансирующем роботе Arduino вход (который является желаемым наклоном в градусах) устанавливается программным обеспечением. MPU6050 считывает текущий наклон робота и подает его на алгоритм PID, который выполняет вычисления для управления двигателем и удерживает робота в вертикальном положении.
PID требует, чтобы значения Kp, Ki и Kd были настроены на оптимальные значения. Инженеры используют программное обеспечение, такое как MATLAB, для автоматического вычисления этих значений. К сожалению, мы не можем использовать MATLAB в нашем случае, потому что это еще больше усложнит проект. Вместо этого мы будем настраивать значения PID. Вот как это сделать:
- Сделайте Kp, Ki и Kd равными нулю.
- Отрегулируйте Kp. Слишком маленький Kp заставит робота упасть, потому что исправления недостаточно. Слишком много Kp заставляет робота идти дико вперед и назад. Хороший Kp сделает так, что робот будет совсем немного отклоняться назад и вперед (или немного осциллирует).
- Как только Kp установлен, отрегулируйте Kd. Хорошее значение Kd уменьшит колебания, пока робот не станет почти устойчивым. Кроме того, правильное Kd будет удерживать робота, даже если его толькать.
- Наконец, установите Ki. При включении робот будет колебаться, даже если Kp и Kd установлены, но будет стабилизироваться во времени. Правильное значение Ki сократит время, необходимое для стабилизации робота.
Поведение робота можно посмотреть ниже на видео:
Код Ардуино самобалансирующего робота
Нам понадобилось четыре внешних библиотеки, для создания нашего робота. Библиотека PID упрощает вычисление значений P, I и D. Библиотека LMotorController используется для управления двумя двигателями с модулем L298N. Библиотека I2Cdev и библиотека MPU6050_6_Axis_MotionApps20 предназначены для чтения данных с MPU6050. Вы можете загрузить код, включая библиотеки в этом репозитории .
Значения Kp, Ki, Kd могут работать или не работать. Если они этого не делают, выполните шаги, описанные выше. Обратите внимание, что наклона в коде установлен на 173 градуса. Вы можете изменить это значение, если хотите, но обратите внимание, что это угол наклона, которым должен поддерживаться роботом. Кроме того, если ваши двигатели слишком быстры, вы можете отрегулировать значения motorSpeedFactorLeft и motorSpeedFactorRight.
Я катался на Ninebot Mini Pro, лучшем гироскутере в мире. Моя жизнь не будет прежней

Да и не гироскутер это. А настоящий электротранспорт, стоящий каждый рубль. Точно лучше, чем покупка дорогущего iPhone 7.
Вот вам факт. 9 из 10 гироскутеров – дорогостоящий беспомощный мусор.
Ни один умный человек их не купит. Внутри огнеопасная батарея, копеечная электроника, быстро умирающие шины и двигатель со сроком службы максимум полгода.
Узнать такой гироскутер просто: его продают на каждом шагу по 12-22 тысячи рублей. Сотни расцветок, ярких огней и визуальных фишек – лишь бы побыстрее продать.
Увы, гироскутеры в своей массе отвратительны. Потому что не выполняют свою основную задачу – быть городским транспортом. Нужны идеально ровные дороги, отсутствие склонов, камней, ям и прочих реальностей любого крупного города. Как игрушка гироcкутер прокатит на пару недель, не больше.
Уже успел отбросить идею гироскутеров как мёртвую, но меня переубедили.
Когда поставил перед собой Ninebot Mini Pro, ничего о нём не знал. Думал, это очередной электрошлак за большие деньги. Но нет.
Вместо гироскутера мне подсунули почти Tesla на двух колёсах. Это первый электротранспорт, который едет так, будто читает твои мысли. И мне хочется просто пойти и купить его немедленно.
А кто вообще такие Ninebot и почему они почти боги?

На фото тот самый Сегвей. Помните такую штуку? Мечтали о ней в своё время?
Одноимённая американская компания Segway изначально придумала формат электротранспорта с собственным аккумулятором и 2 колёсами на платформе. Когда-то считали, что это станет революцией – но цена, сложность и недоступность сегвеев так и не привели к чуду.
Однако гаджет был космически крутой.
Со временем китайцы освоили идею и научились делать собственные сегвеи. Американцы терпели убытки, но не хотели оставлять мир наедине с дешёвыми и некачественными клонами. Поэтому в 2015-м году они стали частью компании Ninebot – одного из самых сильных производителей электротранспорта в Китае.
Сегвей получил вторую жизнь. Только он теперь называется Ninebot by Segway.

Сегодня ему не требуется «палка», за которую надо держаться. Улучшены все технологии, усилены двигатели, существенно увеличено время автономной работы. Добавлены десятки «умных» функций с привязкой к смартфону владельца – от режима обучения до настоящей сигнализации!
Короче, вы смотрите на Ninebot, но по факту перед вами стоит Segway. Помните об этом. Возможно, американское качество и внимание к деталям и сделали Mini Pro уникальным.
В России официальным дистрибьютором Ninebot является компания Lamobile.ru. Они не только продают эти мини-сегвеи на сайте с гарантией, но и выполняют полное гарантийное и постгарантийное обслуживание.
Дизайн и эргономика. Из чего состоит правильный гироскутер

Внешне Ninebot похож на обычный гироскутер. Но по факту это мини-сегвей. И у него посередине торчит палка-штурвал.
Ты встаёшь на прорезиненные коврики-подставки с маркировкой направления движения, а управляющий штурвал, закрытый пластиковым кожухом, оставляешь между ног.
Это не больно, не страшно, на удивление удобно.
Высота «руля» регулируется: в идеальном положении мягкая подкладка должна стоять сразу после коленной чашечки. Благо один раз настроил – и забыл.
У Ninebot Mini Pro полностью металлический каркас из магниевого сплава аналогичному тому, что используется в авиастроении.

Спереди у Ninebot Mini Pro есть дисплей с индикацией уровня заряда батареи и режима работы Bluetooth-модуля для синхронизации со смартфоном. Там же физическая кнопка выключения и управление скоростным режимом.
Колёса у Ninebot серьёзные. Покрышки из прочной резины с рельефом для сцепления со сложным дорожным покрытием – от бетона и асфальта до гравия, песка и газона.
Диаметр 26 сантиметров, конструкция из 3 элементов: магниевая ступица, металлический диск и покрышка. А, ну ещё колпаки сверху из пластика с мощными креплениями. Едут без единого звука, никакого хруста, дребезга, скрипа, как на большинстве гироскутеров.

Ты реально едешь почти в полной тишине. Слышно только тихое «з-З-з» электродвигателя. Конструкция монолитнее, чем в некоторых айфонах.
Спереди скутера в сторону дороги светят две мощных светодиодных фары. Дальнобойность 7 метров. Фары светят только при недостаточном освещении, автоматически включаются и выключаются. Сзади тоже есть подсветка: два универсальных световых индикатора, которые работают в разных режимах.
При обычном движении вперёд это просто габаритные огни. Если поворачиваешь, они мигают а-ля поворотник, а если тормозишь, загораются супер-ярко.
Управление. Как вообще на нём ездить и каково это

Чтобы ехать вперёд или назад, ты наклоняешься. Несколько гироскопов замечают даже самые минимальные движения, мёртвая зона фактически отсутствует. И это правильно, в чём убеждаешься при движении в городе: реакция должна быть быстрой, иначе врежешься и проедешься по чьим-нибудь ногам 15-киллограммовыми колёсами.
Несмотря на отсутствие мёртвой зоны, держать баланс и темп езды намного проще, чем на обычных гироскутерах. Очень быстро начинает казаться, что Ninebot читает твои мысли – настолько мало движений и усилий нужно, чтобы мини-сегвей ехал именно так, как ты хочешь.

Поворот же устроен интереснее. Используется та самая палка-штурвал: ты легко двигаешь её коленом в нужную сторону, и мини-сегвей мгновенно начинает поворачивать туда.
Угол поворота зависит от того, как сильно отклонишь штурвал. У него мёртвая зона есть, но очень маленькая. При этом сделать резкий поворот случайно почти нереально, это нужно захотеть.
Для торможения достаточно просто встать прямо. Если ты соскочил или упал, скутер остановится мгновенно и сам примет вертикальное положение.
Всё это даёт неописуемые впечатления от езды, несравнимые с любым «массовым» гироскутером. Никакого непонимания и страха, резких поворотов или внезапных разгонов. Ты будто заменил ноги на колёса. Будто твой мозг всегда умел управлять Ninebot Mini Pro, просто вас разделили в детстве.
Ребята, искренне советую покататься на этом девайсе, потому что впечатления того стоят.
Какие «умные» фишки вставила сюда… Xiaomi.

Вот так сюрприз. К созданию Ninebot Mini Pro приложила руку Xiaomi. Скажу больше: Xiaomi инвестировала 80 миллионов долларов в Ninebot, чтобы сделать их девайсы дико умными. Они помогли создать фирменное приложение и популяризировали товар.
При первом запуске программа предлагает краткий гайд по езде на мини-сегвее. В него даже входит практическая проверка твоих навыков вождения: ты будто сдаёшь мини-экзамен и в процессе учишься разгоняться, тормозить и смело поворачивать на любой скорости.
Гайд надо пройти обязательно, потому что до этого момента мини-сегвей будет ездить с ограничением скорости 5 км/час. Ninebot Mini Pro очень быстрый, и кататься на нём нужно с умом.
Ну а после гайда тебя просто смывает десятками функций.
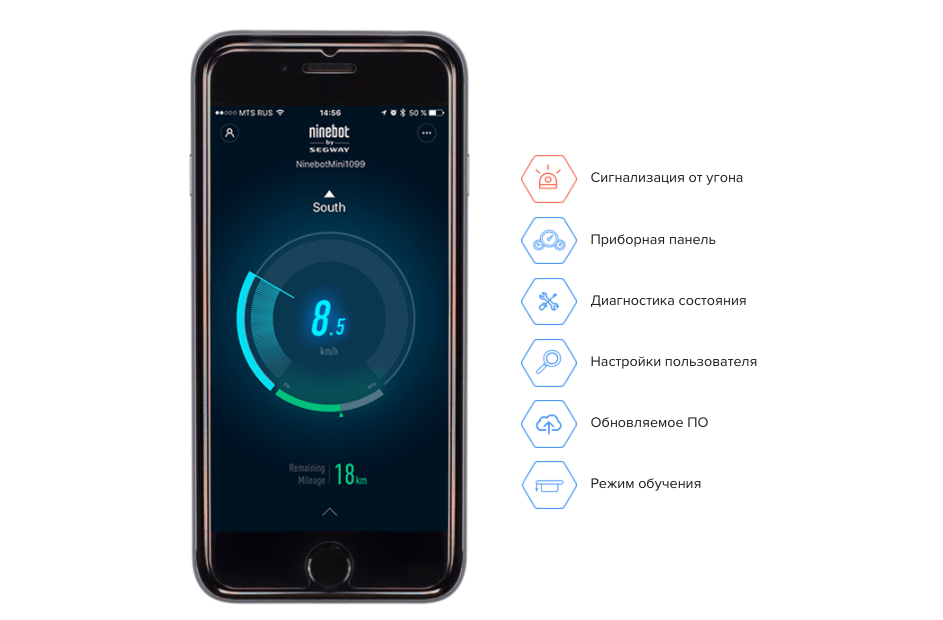
Смартфон и приложение заменяют Ninebot Mini Pro приборную доску: в нем выводится текущая скорость, заряд аккумулятора в мАч, текущие показатели батареи (ток, мощность и температура) и даже температура корпуса.
Из этих данных точно высчитывается время автономной работы в нынешнем режиме использования. Также Ninebot умеет считать расстояние — за текущую поездку и в целом. Даже можно установить пароль, без которого Ninebot Mini Pro нельзя будет включить, просто не заведется мотор. Ну и выключить-включить со смартфона, естественно.
Впрочем, это мелочи. Сейчас ты обалдеешь: Ninebot Mini Pro фактически имеет базовые функции автопилота.

Ты можешь оставить его на парковке, затем издалека открыть приложение – и вызвать мини-сегвей прямо к тебе. Он берёт и реально к тебе едет, соблюдая баланс. Ну а оставлять на парковке не страшно — есть и встроенная программная сигнализация, и блокировка мотора, и даже защита от подъема.
Даже если кто-то его попытается украсть, использовать не получится.
Еще более важные функции — возможность калибровки гироскопов и установка уровня чувствительности системы. Доступна даже балансировка. Куда там обычным гироскутерам, на которых рюкзак заставляет сгибаться в три погибели.
На Ninebot Mini Pro ты можешь ехать с любыми сумками и рюкзаками, даже если они на плече. Просто включаешь калибровку, становишься и спокойно едешь.

Естественно, можно ограничить скорость.
Максимальный разгон – 18 км/час, это очень много. Для старта или детей хватит 5 км/час. Если превышаешь скорость, срабатывает звуковой сигнал, и мини-сегвей безопасно замедляется, соблюдая темп без резких движений.
Кстати, на борту есть «черный ящик» — накопитель, на который пишется GPS-сигнал, параметры поездки и другие критически важные данные. Доступ к ним можно получаешь также из приложения.
Сколько и как долго работает по паспорту

Еще одно достоинство Ninebot Mini Pro — емкая батарея на 5700 мАч.
В совокупности с отлично отлаженной работой моторов это дает феноменальные результаты дальности.
Официально производитель говорит о том, что Ninebot может проехать около 30 километров. Это расстояние зависит от качества дорожного покрытия, стиля вождения, уровня горизонта и скорости. Ninebot даже снижает ее до 5 км/ч при достижении определенного уровня заряда аккумулятора.

Ninebot Mini Pro в этом существенно отличается от аналогов: с ним можно покорять ровные пляжи, ухабы, укатанные грунтовые дороги и даже газоны.
А 2 мотора по 400-ватт с повышенным крутящим моментом 70 Нм помогает скутеру подниматься под углом до 15 градусов без каких-либо проблем с ходовой.
По шоссе максимальная скорость составляет 18 км/ч. Автоматика запрещает разгоняться выше этого предела, начиная притормаживать.
Как по мне, комфортной скоростью в городе можно назвать 10—12 км/ч: это быстрее пешеходов и «самокатчиков», а ещё позволяет скутеру мгновенно остановиться и не попасть в аварию.
Почему я влюбился в Ninebot за 3 минуты и не хотел отдавать

Первое впечатление от обычных гироскутеров – это какая-то хрень, зачем я это купил.
С Ninebot всё иначе – удивление и радость от того, что всё может просто работать. Ездил на нём без остановки 4 часа и не мог остановиться, потому что это было обалденно и открыло мне глаза.
Оказывается, такая вещь может быть нужной и полезной в городе. Просто он такой один, а остальные даже не рядом. Знаю, что это будет звучать как клише. Но каждый, кто катался на Ninebot, со мной далее согласится.

Ninebot Mini Pro – самый продуманный личный электротранспорт, который сегодня можно купить в России за 30+ тыс. рублей. И не надо начинать кричать про высокую цену. Это случай, когда гаджет стоит каждого рубля.
Белый NineBot Mini Pro исколесил со мной пол-Москвы, ничего не стесняясь: ни ям, ни камней, ни полного отсутствия дороги. Кажется, он стал частью тела, настолько хорошо мы поняли друг друга. Никакого страха упасть, полное доверие и идеальная работа электроники.
Я позволял себе с ним всё:
- Я на скорости поднимался на бордюры без страха упасть (!)
- Разгонялся до максималки, ехал а-ля круиз контроль и тормозил в доли секунды
- Входил в быстрые сложные повороты между людьми с ювелирной (!) точностью
- Добирался до нужных мест города в 4 раза быстрее, чем пешком
- Вообще не уставал даже после 5-часовых заездов
- Никогда не боялся, что он разрядится
Кому и когда нужен NineBot Mini Pro. Да, не всем

Подзаголовок с таким вопросом может показаться странным после моего эмоционального старта и заслуженной любви к девайсу. Раз Ninebot такой крутой, почему бы его не купить всем и каждому?
Ninebot идеален для Москвы и Санкт-Петербурга, а также для городов с продуманной пешеходной инфраструктурой. При этом нужно понимать: если в двух столицах это фактически транспорт, то в регионах это в основном будет прогулочный девайс.
Речь не про качество дорожек: на Ninebot можно гонять через ямы, пыль, кочки и камни, я проверял. Просто на пешеходных переходах может не хватать съездов или невысоких бордюров.
Буду судить по себе. В родном городе (Воронеж) много плитки и практически везде нормально оборудованы пешеходные зоны. Но иногда даже в самом центре попадаются места, где высота бордюра в местах вынужденного съезда превышает 15 сантиметров.
А по факту во всех городах страны есть зоны, в которых можно комфортно гонять на мини-сегвеях.
Полезность Ninebot Mini Pro зависит от окружающей вас среды и степени урбанификации. Если что-то не так, не вините гаджет. Потому что он обалденный.
Напоследок. Пять причин взять Ninebot сейчас и не оглядываться
1. Если от работы до дома вам идти час-полтора, и между ними есть стабильные пешеходные зоны
2. Если твоя жизнь сосредоточена вокруг двух-трёх районов города
3. Если ты хочешь летать по улицам города и не тратить ни капли сил
4. Если гироскутеры разочаровывали, но сама идея очень нравилась
5. Если вы хотите шагнуть в будущее и попробовать самый лучший личный электротранспорт в мире.
Вот я сейчас сижу и смотрю на цену. 35 тысяч рублей – оправданная цена за самый продвинутый гибрид гироскутера и мини-сегвея от создателей и того, и другого. Но ещё есть модель попроще, выпускающаяся под брендом Xiaomi – Ninebot mini. Она стоит уже 23 тысячи рублей.
Она выпускается для китайского рынка и имеет несколько отличий от полноценной версии, что у меня была на обзоре. Лично я бы добавил и взял Pro, ибо он держит больший вес, скорость и работает дольше. Ну а так выбор за вами.
Сборка гироскутера своими руками в домашних условиях
Появление средств передвижения на электротяге, снабженных электронным управлением, сразу же сделало их популярными. Сегвеи и гироскутеры выглядели настолько привлекательно, что сразу же появились желающие попробовать сделать гироскутер своими руками.
Понятно, что электротранспорт, изготовленный в домашних условиях, внешне отличается от заводских изделий, однако, при его создании используются технологии, практически идентичные тем, что применяются для изготовления гироциклов в массовом производстве.
Как устроен гироскутер
Разобравшись в предназначении каждого из элементов комплекта оборудования, заключенного внутри корпуса, можно начинать работу над созданием гироскутера собственного производства. Любой из видов гиробордов является самобалансирующимся средством передвижения.
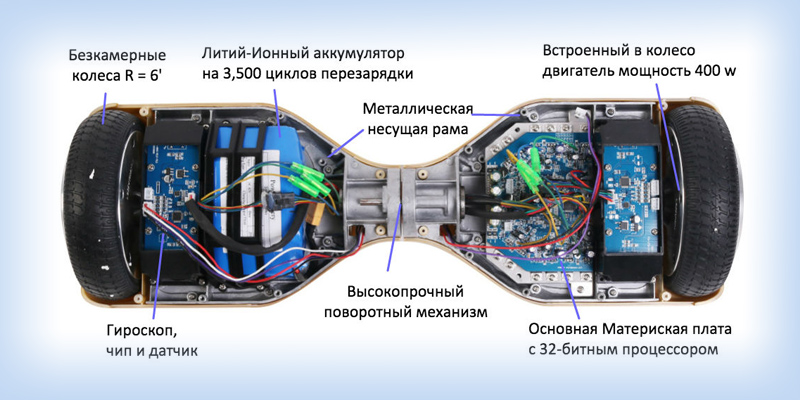
При его работе используется система гироскопических датчиков и технология, обеспечивающая баланс платформы. Одновременно с включением гироцикла приходит в действие система балансировки. В момент, когда водитель занимает свое место на платформе, она начинает менять положение, что считывается гироскопическими датчиками.
Полученная информация направляется на вспомогательные платы, размещенные по обе стороны платформы. Данные платы перерабатывают полученную информацию и отправляют ее в материнскую плату, где установлен микропроцессор. Материнская плата выполняет программу самобалансирования.
На практике происходят следующие действия:
- при наклоне платформы на несколько градусов вперед, двигатели получают сигнал на движение в обратном направлении до момента ее выравнивания. При наклоне в другую сторону запускается такой же процесс;
- на наклон платформы на больший градус, программа устройства отвечает командой электродвигателю на начало движения в направлении, обозначенном положением площадки;
- отключение двигателей и самого гироскутера происходит при отклонении платформы относительно горизонтали на угол более 45°.
Основные детали конструкции гироцикла
Перед тем, как сделать гироскутер в домашних условиях, потребуется подобрать комплект деталей, необходимых для сборки транспортного средства. Для этого потребуются:
- прочная основа, на которой будет закреплена электронная часть устройства;
- два электродвигателя, обладающие мощностью, достаточной для передвижения человека весом до 100 кг; , дополненная двумя платами с гироскопическими датчиками; ;
- два колеса одинакового диаметра.
Начнем с выбора электродвигателя. Он должен быть не менее 350 Вт, тогда суммарная мощность двух двигателей будет достаточной для перемещения веса взрослого человека. Для работы электродвигателей потребуется аккумулятор, способный без дополнительной зарядки обеспечивать подачу необходимой электроэнергии не менее часа. Поэтому его номинальная мощность выбирается не менее 4400 мА/ч.
К выбору колес следует подходить серьезно. У них должны быть прочные шины, а поскольку самодельный гироскутер будет иметь корпус больше и массивнее заводского, то необходимо обеспечить достаточное расстояние платформы от земли. Диаметр колеса должен быть не менее 10-12 дюймов.

Схема управления гироборда
Существует множество вариантов схем управления гироциклами, разработанных производителями устройств. Представлены и разработки любителей. Большинство «самоделкиных» для создания схемы управления транспортным средством используют микроконтроллеры Arduino, широко представленные на рынке.
Лучшим решением является UnoNano, а дополнительным чипом для обработки информации становится ATmega 328. Потребуется также два гироскопических датчика типа InvenSense MPU 6050. Их располагают на дополнительных платах, осуществляющих первичную обработку данных о положении платформы. В схему управления входят также датчики балансировки и датчики поворотов.
Сборка самодельного гироборда
Наиболее часто для изготовления корпуса создатели самодельного электротранспорта используют бруски и толстую фанеру. Основной причиной выбора деревянной конструкции корпуса становится его изоляционные свойства и легкость изготовления. Размеры корпуса выбираются таким образом, чтобы в нем удобно располагались все детали устройства.
В первую очередь по бокам платформы монтируются двигатели, к которым зубчатой передачей присоединяются колеса. Для установки аккумулятора, заключенного в специальную коробку, выбирается место строго посередине коробки корпуса. Двигатели крепятся болтами, а для закрепления аккумуляторной коробки можно использовать саморезы.
В конструкцию самодельного устройства входит рулевой столб, на котором устанавливается кнопка готовности, нажатие которой будет служить командой поступления питания на двигатели. При её отжимании отключатся двигатели и сам гироскутер. С ее помощью будет обеспечена безопасность езды водителя.
При выполнении наладки микроконтроллера лучше воспользоваться услугами друзей, умеющих устанавливать программу Arduino Terminal и регулировать необходимые параметры.
Как сделать гироскутер своими руками – практическое руководство
Увидев балансирующий гироскутер, многие захотят себе подобное устройство. Однако тут станет вопрос цены – купить новый от брендового производителя, или попытаться собрать гироскутер своими собственными руками в домашних условиях?
Давайте попробуем поэтапно разобраться в процессе сборки самобалансирующегося скутера, используя минимальные затраты и подручный инструмент.
Шаг 1: Начало сборки базовой модели
Изначально нам понадобятся колеса и запчасти от любого самоката, двигатель и немного электроники. Создание балансировочной передвижной единицы не слишком сложно. Если в чулане или на чердаке завалялась старая доска от скейтборда – тоже пригодится.

Стальной и алюминиевый уголки, плоская пластина (материал любой) и небольшая трубка из нержавеющей стали – все это будем сваривать и скручивать между собой, чтобы сделать зону для ног и ручку для поддержки.
Двигатели расположим по бокам, а электронику установим спереди. Пластиковую трубу большого диаметра разрежем пополам, чтобы использовать ее части в качестве держателя батареи, который крепится к верхней части одного из двигателей. Для основной площадки подойдет старый скейт, толстая фанера или лист алюминия.

Далее последует настройка полярности на двигателях и корректировка значения крутящего момента и мощности. Идеально подойдет 18-вольтовая батарея вместо 24 вольт.
Шаг 2: Детали
Вот краткий перечень основных комплектующих, которые вам понадобятся для изготовления гироскутера своими руками:

- Arduino UNO – системная плата, микрокомпьютер.
- Контроллер двигателя Sabertooth 2×25.
- 5 акселерометров DOF.
- 2 задних крепления от скутеров или детских самокатов.
- 2 x 14.4Volt литий-ионные батареи.
- Твердая рама для крепления двигателей и колес.
- Регулируемая по высоте ручка
- ЧПУ платформа.
- Моторы и колеса придется отдельно искать или покупать новые.
- Батареи — SLA хорошие и дешевые.
- Экранированный многожильный кабель для акселерометра и тяжелый силовой кабель для двигателей.
- Переключатель Deadman (предохранитель).
- Переключатель для поворота.
- Тумблер для регулировки положения баланса.
- Разъем постоянного тока для Arduino.
- DIL-штырьки в соответствии с Arduino.
- Двусторонняя клейкая лента.
- Винты, болты, шурупы и т.д.
Шаг 3: Инструменты
Как же сделать гироскутер своими руками в домашних условиях, и что нам для этого понадобится в первую очередь? Будет очень кстати, если вы обладаете базовыми навыками электросварки и имеете соответствующее оборудование для сварки рамы. Необходимы базовые инструменты:
- Сверла по металлу/дереву.
- Конусные сверла – можно использовать довольно недорогие (например марки LiPo).


Шаг 4: Рама и двигатели
Для рамы используют две части стального уголка и две пластины, чтобы закрепить двигатели скутеров.
Отрежьте 2 одинаковые части уголка до необходимого размера (под свои ноги).
Отверстия просверливаем в пластинах в соответствии с отверстиями для болтов на задних колесах скутеров. Эти пластины привариваем к уголкам (если нет сварки, то все фиксируем саморезами по металлу).


На всю эту конструкцию добавляем стойку, а на ней закрепляем T-Bar руль.
Добавляем кусок алюминиевого уголка от вертикальной рукоятки до стального основания – это создаст дополнительную опору для руля.

Колеса можно закрепить в креплениях из-под самокатов болтами соответствующего диаметра.
Второй вариант рамы:
Как сделать красивый гироскутер своими руками? Вот еще один вариант сборки для рамы, он будет выглядеть более стильно.
Раму можно сделать из трубки 25 мм и еще дополнительно усилить, чтобы удерживать больше веса.

Передняя рукоятка может быть сделана регулируемой, так, чтобы у данного гироскутера был не только один пользователь.
Держатель для батареи можно найти б/у с любой старой модели электрического самоката.
Устанавливаем рифленую пластину на основание, чтобы ноги не скользили по поверхности.
Шаг 5: Колеса
Закрепите колеса на месте, накрепко завинтив зажимные оси с помощью рожкового ключа. Удостоверьтесь, что колеса не притираются к раме, и затягивайте болты только после того, как выставите колеса на необходимое расстояние.


Как только это будет сделано, подключите их к двигательной системе и датчику наклона. Проводку спрячьте под основание.
Шаг 6: Электроника
Электроника, используемая в данном гироскутере, довольно проста: Arduino, IMU, Motor drive и куча переключателей и реле.
Все кабели для коммутаторов и IMU должны быть экранированными, за исключением случаев, когда IMU находится рядом с Arduino.
IMU необходимо установить под центр платформы или спереди, если это возможно.


Батареи устанавливаем на двигатели.

Провода рулевого управления проводим по рулю.
Шаг 7: Настройка
Используя специальный софт, подключаемся к ардуин, и выставляем значения мощности, крутящего момента и прочую регулировку. Не забывайте, что всю настройку питания необходимо выполнять исходя из того, что мы используем 24 В двигатели и 18 В батареи.

ПРЕДУПРЕЖДЕНИЕ: Создание собственного гироскутера своими руками может быть очень опасным. Вы никогда не сможете предсказать конечный результат, поэтому проводить тесты необходимо в специальной защите и под присмотром опытных гонщиков на гироподах.
Источники:
https://yaroslavldom.ru/interior-design/gusenichnyi-sigvei-svoimi-rukami-kak-izgotovit-svoimi-rukami.html
https://www.iphones.ru/iNotes/ya-katalsya-na-luchshem-giroskutere-v-mire-moya-zhizn-ne-budet-prezhney-04-27-2019
https://gyrorating.ru/giroskutery/sborka-giroskutera-svoimi-rukami-v-domashnix-usloviyax/
https://nakolesah.guru/kak-sdelat-giroskuter-svoimi-rukami-v-domashnih-uslovijah-rukovodstvo-i-instrukcija/